


FELIPE FERNANDES FRANÇA
Controlador PID para controle de temperatura de uma carga resistiva AC
Guaratinguetá - SP
2018



















































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Os melhores documentos à venda: Trabalhos de alunos formados
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Comunidade
Peça ajuda à comunidade e tire suas dúvidas relacionadas ao estudo
Descubra as melhores universidades em seu país de acordo com os usuários da Docsity
Guias grátis
Baixe gratuitamente nossos guias de estudo, métodos para diminuir a ansiedade, dicas de TCC preparadas pelos professores da Docsity
Uma resposta de sistemas de controle pid (proporcional-integral-derivativo) para diversos valores de ganho proporcional, integral e derivativo. O texto aborda a popularidade e história dos controladores pid, suas vantagens e tipos de tecnologia de implementação. Além disso, são discutidos os métodos de sintonia para obtenção dos parâmetros do controlador pid, como o método ziegler-nichols em malha aberta e fechada, e o método do relé.
O que você vai aprender
Tipologia: Notas de aula
1 / 64

Esta página não é visível na pré-visualização
Não perca as partes importantes!
Controlador PID para controle de temperatura de uma carga resistiva AC
Guaratinguetá - SP 2018
Felipe Fernandes França
Controlador PID para controle de temperatura de uma carga resistiva AC
Trabalho de Graduação apresentado ao Conselho de Curso de Graduação em Engenharia Elétrica da Faculdade de Engenharia do Campus de Guaratinguetá, Universidade Estadual Paulista, como parte dos requisitos para obtenção do diploma de Graduação em Engenharia Elétrica. Orientador: Prof. Dr. Francisco Antonio Lotufo
Guaratinguetá - SP 2018
Em primeiro lugar agradeço aos meus pais pela educação concedida a mim e papel fundamental na minha formação acadêmica. ao meu orientador, Prof. Dr. Francisco Antonio Lotufo por toda sua ajuda e disponibilidade sempre quando necessário. aos demais professores e funcionários da Faculdade de Engenharia de Guaratinguetá, que contribuíram de alguma forma para a realização deste estudo. aos gênios do passado, que dedicaram sua vida em prol da ciência e progresso da humanidade.
Este trabalho de conclusão de curso consiste em um estudo e desenvolvimento de um sistema no qual seja possível controlar a temperatura, automaticamente, de uma carga em corrente alternada. O sistema é composto por um sensor de temperatura, um resistor cerâmico, um circuito externo de potência e um sistema de monitoramento, composto basicamente pelo microcontrolador Arduino. Para a sintonia do controlador PID e obtenção de seus parâmetros foram utilizados os métodos de Ziegler-Nichols, Cohen-Coon e do Relé. Posteriormente é feita uma comparação de desempenho qualitativa e quantitativa com relação a resposta ao degrau, com e sem distúrbio externo, para cada método utilizado.
PALAVRAS-CHAVE: Controlador PID. Ziegler-Nichols. Cohen-Coon. Relé.
This course completion work consists of a study and development of a system in which it is possible to automatically control the temperature of a load on alternating current. The system consists of a temperature sensor, a ceramic resistor, an external power circuit and a monitoring system, composed basically of an Arduino microcontroller. The Ziegler-Nichols, Cohen-Coon and the Relay methods were used for tuning the PID controller and obtaining its parameters. Subsequently a comparison of the qualitative and quantitative performance with respect to the step response, with and without external disturbance, is made for each method used.
KEYWORDS: PID Controller. Ziegler-Nichols. Cohen-Coon. Relay.
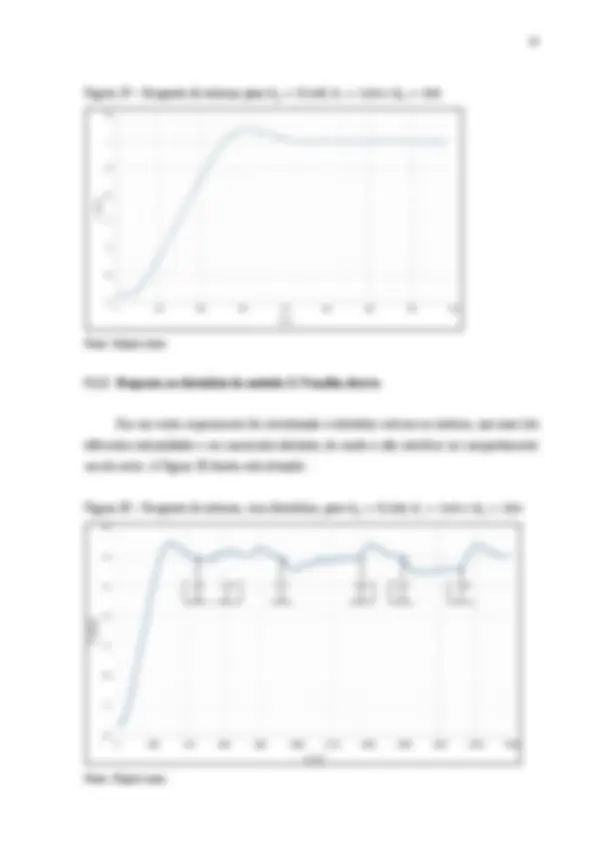
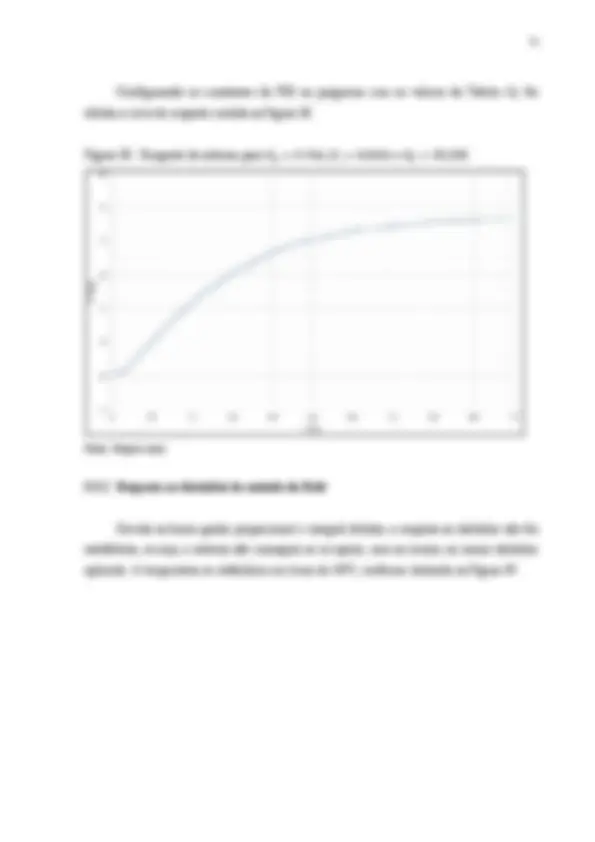
Figura 28 – Comportamento em malha aberta do sistema para o método de Ziegler-Nichols Malha Aberta ........................................................................................................................... 43 Figura 29 – Resposta do sistema para 𝐾 = 52.68, 𝐾 = 2.64 e 𝐾ௗ = 264 .......................... 44 Figura 30 – Resposta do sistema, com distúrbios, para 𝐾 = 52.68, 𝐾 = 2.64 e 𝐾ௗ = 264
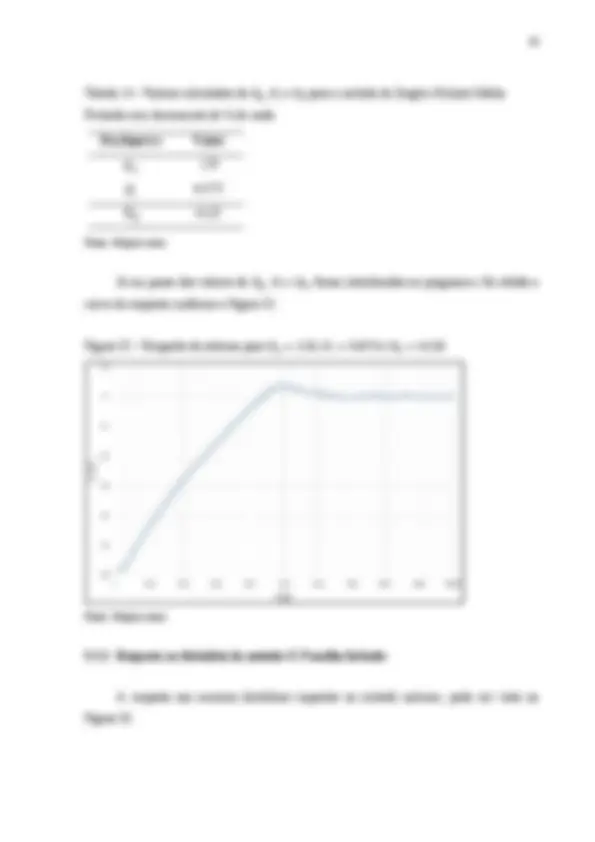
.......................... ....................................................................................................................... 44 Figura 31 – Resposta do sistema para 𝐾 = 200, 𝐾 = 0 e 𝐾ௗ = 0 ....................................... 45 Figura 32 – Resposta do sistema para 𝐾 = 120, 𝐾 = 0.873 e 𝐾ௗ = 4125 ......................... 46
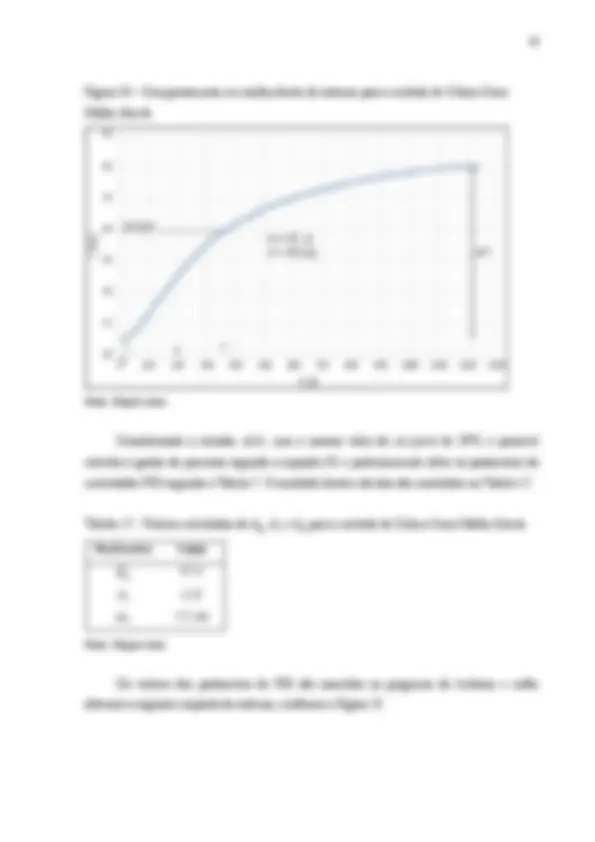
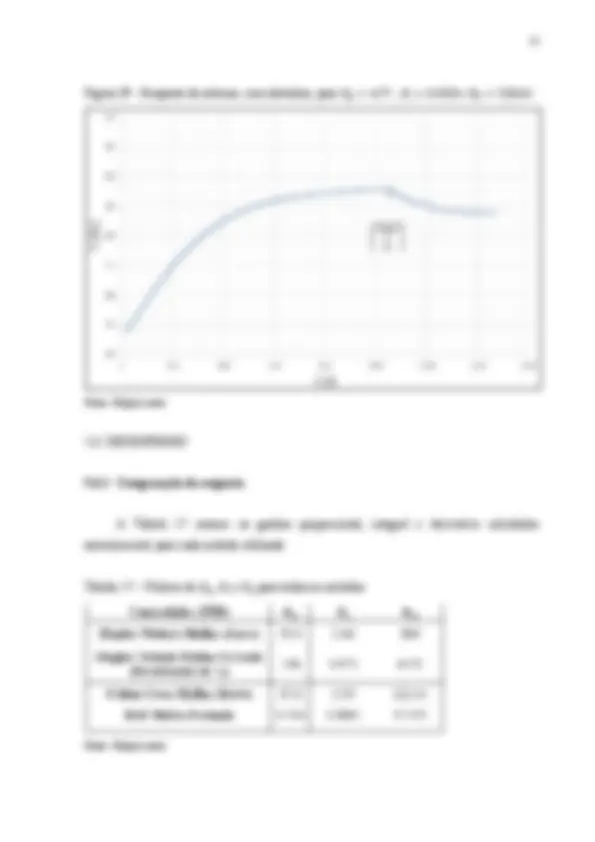
Figura 33 – Resposta do sistema, com distúrbios, para 𝐾 = 120, 𝐾 = 0.873 e 𝐾ௗ = 4125 .......................... ....................................................................................................................... 47 Figura 34 – Comportamento em malha aberta do sistema para o método de Cohen-Coon Malha Aberta ........................................................................................................................... 48 Figura 35 – Resposta do sistema para 𝐾 = 87.6, 𝐾 = 3.55 e 𝐾ௗ = 322.44 ....................... 49
Figura 36 – Resposta do sistema, com distúrbios, para 𝐾 = 87.6, 𝐾 = 3.55 e 𝐾ௗ = 322. .......................... ....................................................................................................................... 49 Figura 37 – Resposta do sistema ao relé.................................................................................. 50 Figura 38 – Resposta do sistema para 𝐾 = 0.764, 𝐾 = 0.0041 e 𝐾ௗ = 35.335 ................. 51 Figura 39 – Resposta do sistema, com distúrbio, para 𝐾 = 0.764, 𝐾 = 0.004 e 𝐾ௗ = 35. .......................... ....................................................................................................................... 52 Figura 40 – Resposta para todos métodos apresentados.......................................................... 53 Figura 41 – Critérios de desempenho para a resposta ao distúrbio ......................................... 55
Tabela 15 – Valores calculados de 𝐾, 𝐾 e 𝐾ௗ para o método de Cohen-Coon Malha Aberta
t Tempo T Temperatura e(t) Sinal de erro u(t) Sinal de saída do controlador y(t) Sinal de saída do processo 𝐾 Ganho proporcional
𝐾 Ganho integral 𝐾ௗ Ganho derivativo 𝑇 Tempo integral 𝑇ௗ Tempo derivativo 𝑇 Período de oscilação 𝑡 Tempo de duplicação 𝑡ௌ Tempo de subida 𝑡 Tempo de assentamento 𝑇ெÍே Temperatura mínima durante distúrbio 𝑇ெÁ Temperatura máxima após retirada do distúrbio 𝑡ோா Tempo de recuperação ao distúrbio
14
A necessidade de se controlar sistemas e processos industriais nos acompanha desde o surgimento da revolução industrial. O controle manual foi a primeira forma de controle utilizada em larga escala, no qual, depende de um operador humano que conheça o processo e possua habilidade na atuação deste. Com o crescente avanço na tecnologia e automatização nos processos industriais, essa tarefa foi ficando cada vez mais árdua, devido à complexidade para se atuar no sistema. Esta situação toda gerou uma demanda para solucionar o problema, que rapidamente atingiu a mente de grandes nomes do mundo acadêmico e inventores da época. Em 1788, James Watt criou seu primeiro governador centrífugo, conhecido em inglês como flyball governor, que foi um dispositivo mecânico regulador que era capaz de controlar a velocidade de um motor a vapor através da regulação da quantidade de vapor admitido nos cilindros, a fim de manter a velocidade constante para diversos tipos de cargas aplicadas ao eixo, dentro de um certo limite operacional, utilizando apenas o conceito de controle proporcional (P). Na Figura 1 é mostrado o governador de Watt acoplado a um motor a vapor, exposto em um museu, localizado em Londres.
Figura 1 – Governador centrífugo de James Watt
Fonte: Junge (2008).
15
O controle proporcional, por si só, não é capaz de zerar o erro em regime permanente para muitos processos e sistemas, podendo inclusive causar instabilidade para valores de ganho proporcional muito alto. Por volta de 1930, engenheiros de controle descobriram que o erro em regime permanente poderia ser zerado ao se integrar o mesmo e posteriormente adicionar o resultado desta operação ao termo proporcional, hoje este tipo de controlador é conhecido como Proporcional-Integral (PI). Entretanto, a adição do termo integral ao sistema, pode gerar novos problemas, como o aumento do sobressinal máximo, overshoot, e também aumento da oscilação, hunting, (SANCHES, 2017). Em 1940, foi lançado pela Taylor Instrument Companies, o primeiro controlador Proporcional-Integral-Derivativo (PID) pneumático. A ação derivativa era chamada em inglês de pre-act, e veio para corrigir os problemas gerados pelo controlador PI, especificamente, atuando para diminuir o overshoot e o hunting do sinal controlado. Contudo, nesta época, os controladores PID eram ainda pouco populares, devido as dificuldades de sintonização e pelo fato de que a maioria dos controladores eram pneumáticos, possuindo assim inúmeras limitações na capacidade de processamento. A popularidade dos controladores PID só aumentou em 1942, com a criação de um método simplificado de sintonia, que foi apresentado através de um artigo escrito por Ziegler e Nichols com o título de “Optimum settings for automatic controllers”, onde, de forma relativamente simples, era proposto uma metodologia para se obter os parâmetros do controlador, (DILLENBURG, 2016). O começo da era do transistor, juntamente com o novo método de sintonia de Ziegler e Nichols, foi decretado o fim dos controladores pneumáticos, e assim possível a criação de controladores PID eletrônicos automáticos com capacidade de processamento elevada, ideais para sistemas e processos complexos, (DILLENBURG, 2016). Atualmente, existem inúmeros métodos de sintonia e diferentes tipos de tecnologia para implementação de controladores PID, onde, em sua grande maioria, estão integrados internamente aos controladores lógicos programáveis e são capazes de realizar a sintonia de forma automática e segura, por exemplo, utilizando o método do Relé, que será apresentado mais adiante neste trabalho.
1.2 MOTIVAÇÃO
Tendo em vista a importância histórica e o uso abundante dos controladores PID na indústria, busca-se elaborar um estudo teórico e prático sobre os mesmos, voltado para o controle de temperatura de uma carga resistiva em corrente alternada.
17
O controlador com ação puramente proporcional, é aquele cujo a saída, y(t), é diretamente proporcional ao sinal de entrada, set point (SP), multiplicado por uma constante. De maneira fácil, pode se entender o controlador proporcional como um amplificador com ganho ajustável. Um exemplo de controlador proporcional é apresentado na Figura 2.
Figura 2 – Diagrama de blocos de um controlador proporcional
Fonte: Próprio autor.
A relação entre o sinal de saída do controlador, u(t), e o sinal de erro, e(t), é dado pela equação (1), onde 𝐾 é o ganho proporcional.
A principal vantagem do modo proporcional está no fato de que ele fornece um ajuste rápido da variável manipulada (MV), tornando mais rápida a dinâmica do processo, (PINTO, 2014). A grande desvantagem é que o aumento demasiado de 𝐾, pode conduzir o sistema à oscilação, e assim o processo deixa de ser estável, (SANCHES, 2017). Na Figura 3, é apresentado a resposta de um sistema com controle puramente proporcional à uma entrada degrau, para diversos valores de 𝐾. Podemos notar que o aumento do ganho proporcional, realmente, contribui para que o sistema oscile indesejadamente.
18
Figura 3 – Resposta de um sistema com controle proporcional à uma entrada degrau para diversos valores de ganho proporcional 𝐾
Fonte: Åström e Hägglund (1995).
2.2 AÇÃO PROPORCIONAL-INTEGRAL (PI)
A ação integral é responsável por eliminar o erro em regime permanente, porém, nunca é utilizada sozinha. É sempre indicado usar um controlador proporcional-integral (PI), que mantém as propriedades quanto ao erro de um controlador integral puro e adiciona as vantagens do controlador proporcional a este, (GALDINO, 2012). A componente integral adiciona um pólo na origem da função de transferência do controlador, eliminando o erro se o sistema for estável em malha fechada, (SANCHES, 2017). A relação entre o sinal de saída do controlador proporcional-integral, u(t), e o sinal de erro, e(t), é dado pela equação (2), onde 𝑇 é o tempo integral ou tempo de reset, dado em segundos ou minutos.
O ganho integral 𝐾 é definido como:
Portanto, a equação de saída deste tipo de controlador também é dada por: