


Controle e Automação
Industrial




























































































Estude fácil! Tem muito documento disponível na Docsity

Ganhe pontos ajudando outros esrudantes ou compre um plano Premium

Prepare-se para as provas
Estude fácil! Tem muito documento disponível na Docsity
Prepare-se para as provas com trabalhos de outros alunos como você, aqui na Docsity
Os melhores documentos à venda: Trabalhos de alunos formados
Prepare-se com as videoaulas e exercícios resolvidos criados a partir da grade da sua Universidade
Responda perguntas de provas passadas e avalie sua preparação.
Ganhe pontos para baixar
Ganhe pontos ajudando outros esrudantes ou compre um plano Premium
Comunidade
Peça ajuda à comunidade e tire suas dúvidas relacionadas ao estudo
Descubra as melhores universidades em seu país de acordo com os usuários da Docsity
Guias grátis
Baixe gratuitamente nossos guias de estudo, métodos para diminuir a ansiedade, dicas de TCC preparadas pelos professores da Docsity
Introdução a programação de CLP. logica programável descritivo em pdf, procedimentos.
Tipologia: Manuais, Projetos, Pesquisas
1 / 130

Esta página não é visível na pré-visualização
Não perca as partes importantes!
2. Sistemas de Controle Industrial:
Existem várias formas de se implementar sistemas de controle automático, entretanto, a mais utilizada é usando sistemas eletroeletrônicos devido principalmente a versatilidade e dinamismo necessários à um controle de processo. Além disso, sistemas elétricos são mais fáceis de se implementar que sistema s dinâmicos. Dado que um sistema de controle é predominantemente elétrico e os processo envolvem transformações mecânicas, químicas e físicas, devemos conve rter o sinal de um controlador eletrônico no sinal adequado ao processo, tanto do ponto de vista da natureza, quanto do ponto de vista de magnitude. Este elemento é o atuador. É ele quem atua diretament e sobre o processo, sempre em resposta à saída do controlador. Para que o controlador gere o sinal de controle para o atuador gerar o sinal de controle do atuador ele precisa de uma referência , ou seja, um sinal na sua entrada que diga ao controlador o que ele deve fazer com o processo. Este é o sinal de referência, ou sinalde entrada. A figura abaixo ilustra o relacionamento entre o controlador, o atuador e o processo.
Sinal de Entrada Controlador Atuador Processo
Em um sistema de controle precisamos saber como anda o processo e obter informações a respeito de parâmetros do mesmo. Ou seja, precisamos de um dispositivo capaz de converter uma grandeza física do processo em uma grandeza elétrica para que possamos mediro andamento do processo. Este elemento é o transdutor e ele se relaciona com o processo conforme a figura abaixo:
Processo Transdutor Indicador
3. Sistemas de Controle em Malha Aberta e Malha Fechada:
Com relação a forma de implementação os sistemas de cont role, podem ser classificados de duas formas : em malha aberta e em malha fechada. Malha aberta: Quando o controlador gera o sinal para o atuador, com base no sinal piloto, sem obter nenhuma informação do sobre o andamento do processo. Ou seja, é um sistema sem realimentação, sendo que o sinal de entrada é o pró prio set-point. Malha fechada: Quando o controlador gera o sinal para o atuador, com base no sinal piloto, porém agora ele recebe informação sobre o andamento do pr ocesso, através de um transdutor. O sinal entrada, no caso, corresponde a diferença entre o set-point e o sinal do transdutor, por isso, também é chamado de sinal de erro. A figura abaixo ilustra as duas formas de controle: Set-Point Controlador Atuador Processo
Indicador Transdutor
Malha aberta (Sem realimentação)
OBS: Observe que no caso da malha aberta o transdutor e o indicador são itens opcionais não sendo importantes para o controle.
Set-Point + Sinal de Erro
Controlador Atuador Processo
- Indicador Transdutor Malha Fechada (Com realimentação)
OBS: O indicador no caso da malha fechada é um item opcional.
A malha fechada apresenta algumas vantagens em relaç ão a malha aberta, principalmente no que tange a menor sensibilidade a interferências e ruídos. Isto porque o sistema sendo realimentado, ,qualquer desvio do sistema, gera um erro que tende a ser compensado. Além disso, o sistema fica mais independente dos parâmetros da planta, já que ele passa a atuar sobre o sinal de erro. Entretanto, também há desvantagens como o custo mais e vadol e a possibilidade do sistema atingir a instabilidade quando o ganho do controlador é muito alto.
4. Transitório e Indicadores de Performance:
Quando ajustamos o set-point a saída leva um tempo para atingir seu valor final. Este tempo é chamado de transitório e é muito importante seu conhecimento para fins de determinação do comportamento do sistema e avaliação da performance do controlador. Para fins de avaliação da performance de um sistema de controle, existem alguns indicadores básicos, muito utilizados para a especificação de um sistema de controle. São os principais:
Regulação: É uma avaliação do sistema com relação á sua capacidade de reduzir o erro entre o valor real da grandeza física controlada e o valor esperado ao final do transitório. O erro no caso é chamado de erro em regime permanente. Se o erro for grande, a regulação do sistema é ruim, se o erro for pequeno a regulação será boa.
Estabilidade: É a capacidade que um sistema tem de dada uma certa en trada limitada fornecer uma resposta limitada. Ou seja, se o processo converge para algum ponto, para uma dada entrada é um sistema estável. Se não, é um sistema instável.
Tempo de acomodação: É o intervalo de tempo em que ajustada uma entrada, o sistema demora para convergir. Ou seja, é o intervalo de tempo emque dura a fase de transitório.
Tempo de subida: É o tempo necessário para que a saída vá de 0 à 100%, ou de 10 à 90% do seu valor final.
Sobrelevação: Conhecido como “overshoot” é o valor máximo atingido pela grandeza física da planta em relação ao valor esperado. É medida em perce ntagem da entrada ajustada. Ocorre na fase de transitório.
Sensibilidade: Avaliação da mudança do comportamento do sistema frente à pequenas variações de parâmetros do sistema.
Rejeição de distúrbios: Capacidade de um sistema de rejeitar distúrbios ou ruídos oriundos de perturbações no sistema.
Controle Proporcional ou P:
O controle proporcional já é mais sofisticado que o controlador ON-OFF, dado que a resposta do controle é proporcional ao sinal na sua entrada. Se o sinal na sua entrada é pequeno, a reposta será um valor pequeno também. Se a entrada for grande a saída será randeg também. Em suma, um controlador proporcional é na verdade um amplificador. Ele é representado como abaixo:
Entrada (^) K Saída
No caso a saída é um sinal K vezes maior que a entrada. Entretanto o sinal de saída não pode crescer indefinidamente, porque há limite tanto inferior quantosuperior. Quando estes limites são atingidos dizemos que o sistema saturou. Portanto, há uma região onde o sinal responde proporcionalmente ao sinal de entrada, e outra região onde o sistema satura e não ainda o sinal de entrada aumentar que o sistema não vai além daquele limite. Na figura abaixo, percebemos que acima do limite superior, o atuador está com 100% de sua capacidade e abaixo do limite inferior o atuador está com 0% de sua capacidade, ou seja, totalmente desligado. A região entre o limite inferior e superior o atuador está com uma saída proporcional a entrada, e esta região é chamada de banda proporcional do sistema.
Limite Sup. 100% Banda Proporcional
Limite Inf. 0%
A banda proporcional de um sistema é dada de forma percentual e está relacionada com o ganho K do controlador. Na verdade ele é determinado pela fórmula abaixo:
Banda proporcional = 100% / K ; onde K é o ganho do controlador.
Muitos controladores possuem o ajuste da banda proporcional disponível. A técnica mais recomendada é deixar a banda proporcional no máximo possível verificar a resposta do sistema. Se não for satisfatória, deve-se ir reduzindo o valor do ajus te até que o desempenho fique adequado. O grande problema do controlador Proporcional ou P é que ele permite erros em regime. Isto porque em sistemas realimentados, a entrada do controlador P é o sinal de erro. Como o sinal de erro vai ficando pequeno a medida que se aproxima do valor de set-point, a saída do controlador que é proporcional a entrada vai ficando pequena também. Sempre haverá um ponto em que o erro, por menor que seja será tão pequeno que não produzirá uma saída capaz de ativar o atuador. Assim o sistema para mesmo sem Ter atingido plenamente o set-point, permanecendo um erro sempre constante. Claro que aumentando o ganho K do controlador o erro será reduzido, mas sempre haverá um erro, porque há limites para aumentar o valor do ganho K, que se ultrapassados, levam o sistema a instabilidade.
Na simulação abaixo, temos uma estufa com um set-point de 100ºC e um controlador tipo P com um ganho K=10. Repare que o sistema estabiliza em 96ºC, permanecendo um erro de 4ºC. Se aumentarmos o ganho, podemos diminuir o erro, mas sempre haverá um erro, por menor que seja.
Controle Proporcional +Integral ou PI:
O controlador PI é uma combinação da ação proporcional c om uma ação de integração. O integrador, dentre suas propriedades, permite com que o erro em regime do caso anterior seja zerado. Isto ocorre porque embora o erro possa ser pequeno, o integrador vai somando ao longo do tempo e a sua saída vai aumentando até que seja capaz de acionar o atuador. Assimsendo, quando o erro é grande o Proporcional fornece uma grande e saída e predomina sobre o integrador. Mas a medida que o sistema vai chegando perto do objetivo, o erro vai diminuindo e assim a resposta do proporcional vai ficando cada vez mais fraca. A partir deste ponto o domínio passa a ser do integrador. Dessa forma o bloco integrador é usado freqüentemente quando precisamos de uma convergência precisa do valor, com erro muito pequeno. Da mesma forma que existe um ganho K para o proporcional existe também um ganho K para o integrador. Quanto maior o valor de Ki, maior a resposta de um I elemento integrador. Entretanto, o ajuste do ganho de KI não deve ser indiscriminado, pois ele pode levar o sistema a se tornar muito lento as transições ou até mesmo levar o sistema a instabilidade. O melhor ajuste é uma combinação do ganho K e do ganho K (^) I. É possível mediante simulações e outras técnicas encontrar o melhor ajuste possível. Não há uma regra geral, cada caso poderá requerer um ajuste diferente, dessa forma dificilmente você poderá utilizarum ajuste que fora bem sucedido em outra empresa ou outro equipamento.
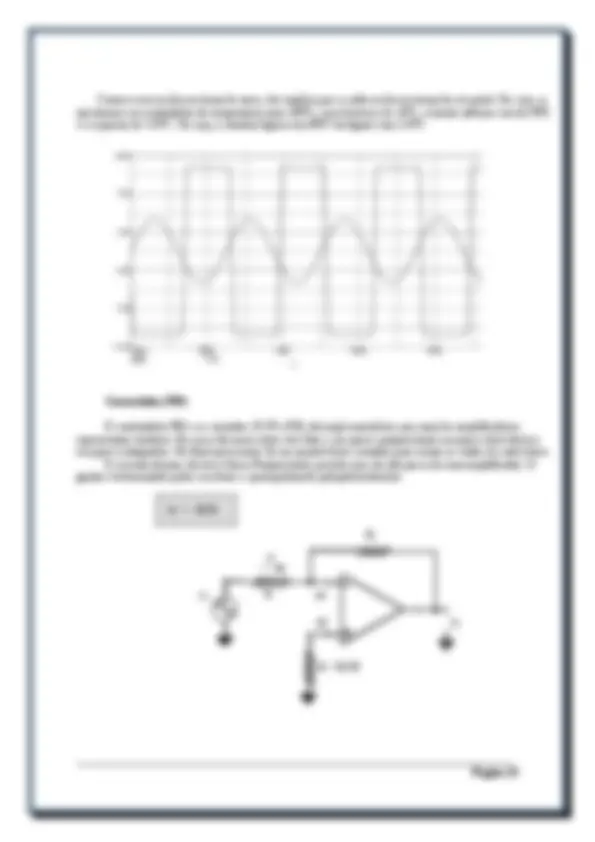
Na simulação abaixo, voltamos ao caso da estufa ajustada para 100ºC, só que retiramos o Integrador e adicionamos um Derivativo. Perceba que como o derivativo não atua sobre o erro em regime, o erro de 4ºC voltou e portanto, o sistema agora converge à 96ºC como antes. Em compensação, na região de 0 até 0.5 segundo, quando o erro varia muito rápido, o sistema atua muito mais rapidamente, pois em 0.5 segundo a temperatura já é de 79ºC, e no caso do controlador P ou PI era de apenas 70ºC. Mas é só até este que o derivativo vai bem, pois de 0.5 segundos em diante, o erro já passa a variar lentamente e a resposta do derivativo jánão é mais adequada. Nesta parte, onde a variação do erro é lenta, o Integr ador responde melhor, além é claro do integrador atuar sobre o erro em regime.
Controle Proporcional + Integral + Derivativo ou PID:
Pelos exemplos acima, fica bastante claro que uma combinação dos três elementos, explorando as propriedades de cada um, parece ser a opção mais adequada. Este é o chamado Controlador PID. Na verdade, com um controlador PID, podemos obter os outros (P , PI ou PD), zerando-se aquele que não interessa. Exemplo: se queremos um controlador PI, ba sta zerar o ganho do Derivativo, se queremos um controlador P, basta zerar o ganho do Derivativo e do Integrador, e assim por diante.
O controlador PID, parece ser a opção ideal para se traba lhar, entretanto, esta é opção mais cara e a mais difícil de ajustar, pois agora temos três ganhos paraajustar (K, KI e KD). A combinação do ajustes pode determinar se o sistema será oscilatório ou não, se o sistema será rápido ou lento. A determinação adequada do ajuste é feita por meio de modelagem e simulações, onde se leva em conta os parâmetros de performance do sistema (máxima sobrelevação, tempo de acomodação, erro em regime, etc..). Na simulação abaixo, voltamos ao exemplo da estufa com se t-point de 100ºC. O controlador agora é um bloco PID. Vemos que na região de 0 a 0.5 segundo o sist ema é rápido por causa do derivativo. Em 0. segundo a temperatura já é de 74ºC, ao passo que no P e noPI era de apenas 70º, ou seja, 6% mais rápido. Verificamos que não há mais erro em regime, dado que a temperatura agora estabiliza em 100ºC, que é o próprio set-point, por causa do Integrador.
Os chamados parâmetros de performance são fortemente de pendentes dos ajuste dos ganhos dos elementos que compõem o PID (K, K (^) I e KD). Na próxima simulação, temos um caso em que o controla dor foi ajustado de forma tal que o ganho do Derivativo fosse baixo, menor que o do Integrador. O sistema utilizado ainda é a estufa, com set-point de 100ºC. Percebemos pelos ajustes o comportamento que o do sistema converge a temperatura em erro em regime, por causa do integrado. Mas o tempo de convergência é diferente do caso anterior. Ealém disso, agora a reposta é oscilatória. No caso anterior, dizemos que a resposta é superamortecida e no caso com oscilações é subamortecida. Quando o sistema passa exibir oscilações com amplitude decr escente e que demoram a sumir estamos chegando perto do limite de estabilidade. Observe a sobrelevação ou “overshoot” no gráfico, que é bem elevado. A temperatura está atingindo até 120ºC, ou seja,20ºC a mais que o desejado .
Nas simulações abaixo, vemos a simulação para vários valo re de ganho K. Vejam como a resposta a saída muda significativamente. A ordem é de K crescente , mas com valores pequenos.
Agora para K de valores mais elevados, veja como o sistema vai ficando mais oscilatório. Valores de K altos levam o sistema a oscilar e tendem a torná-lo nstáveli. Por isso, há limites para aumentar o ganho.
6. Implementação dos Blocos PID
Os blocos PID podem ser implementados de forma analógica ou di gital. Os de forma analógica, processam diretamente os sinais dos transdutores disponíveis usando circuitos de eletrônica analógica. São muito utilizados os amplificadores operacionais, pa ra implementar os blocos Proporcional, Derivativo e Integrador. Já os sistemas digitais, podem se comunicar com os sistemas físicos diretamente. Isto porque os sinais físicos reais(Temperatura, pressão, etc..) s ão todos analógicos. Assim estes sinais devem ser convertidos em sinais digitais primeiro, processados e depois convertidos em sinais analógicos novamente. Neste caso, exigem sistemas baseados em microcontroladores e microprocessadores. Os blocos PID são meros “softwares” destes sistemas digita is. A tendência atual é o uso cada vez maior dos blocos PID digitais. Eles aparecem principalmente nos PLC‟s e CNC‟s. Vamos tratar inicialmente de implementações analógicas e depois das digitais.
7. Sistemas de Controle Analógico:
Controlador ON-OFF:
Na figura abaixo, vemos um comparador com histerese que éa base do controle ON-OFF. Ele usa um amplificador operacional e alguns resistores.
O comparador de histerese é um amplificador operacional realimentado positivamente. O valor da histerese é definidos pelos valores dos resistores R1 eR2.No caso vemos que a saída (sinal quadrado) é ativa ou desativada conforme o sinal de entrada (no caso senoidal, mas podia ser outro) atinge os limites inferior e superior. Na simulação estes limites são r epresentados pelas retas pontilhadas e indicados pelos valores de A1=2.2V e A2=-2.7V, no quadro negro sobre o gráfico. Estes valores são teoricamente iguais, mas na prática devido a tolerâncias de componentes e desequilíbrios eles podem ser um pouco diferentes, mas isto pode ser corrigido inserindo-se potenciômetros para fazer os ajustes. Veja que a histerese é de 5.2V. No caso, o atuador é ligado quando o erro for menor que - 2.7V e o atuador será desligado quando o erro for maior que 2.2V. De qualquer modo ele nunca estabiliza e sim oscila em torno do valor zero.
O bloco abaixo é um Integrador. O ganho é ajustado por um Potenciômetro R5.
E finalmente abaixo, temos o bloco Derivativo. O ganho também é ajustado pelo Potenciômetro:
E finalmente para se obter a saída correta, basta somar as saídas de cada bloco com um amplificador do tipo somador.
O resultado é o bloco PID completo exibido na próxima figura.
Resta agora, apenas verificar como o sinal de erro é gerado. Isto é feito por um circuito que um amplificador diferença. Ou sua versão mais sofisticada que é o amplificador de instrumentação. Perceba na entrada o sinal de se t- point feito por meio de um potenciômetro. Na outra entrada é recebido o sinal do transdutor de temperatura, no caso, uma termoresistência ou RTD tipo Pt-100. O valor desta resistência varia com a temperatura, assim a tensão naquele ponto varia com a temperatura. O amplificador faz a diferença entre os dois sinais e assim o sinal de erro é gerado. Os valores dos componentes são apenas ilustrativos.
Os valores dos componentes acima são apenas ilustrativos. Existem técnicas de controle mais sofisticadas que o PID, são chamadas de controle moderno baseado em espaço de estados. Há também o controle adaptativo, controle robusto, redes neurais artificiais e outras técnicas, mas são mais caras e aplicadas apenas em casos especiais, pelo menos por enquanto.
8. Sistemas de Controle Digital
A exemplo do ocorre com o controle analógico, podemos implem entar um controlador digital e efetuar o mesmo processo de controle que o sistema analógico. Estes controladores são implementados por meio de microprocessadores e microcontroladores que rodam um software que implementa as funções de um bloco PID. A grande vantagem é a facilidade de se modificar o projeto do controlador, uma vez que o controlador é um software. Entretanto, o sinais do mundo físico são analógicos entã o o controle digital não pode ser aplicado diretamente. É necessário converter os sinais analógicos dos transdutores em digitais, processá-los e então converter de novo os sinais digitais em analógicos. Ou seja, o controle digital exige blocos adicionais aos do sistema de controle.
Sistema analógico
Sistema Digital
Os blocos responsáveis pela conversão do sinal analógico em digital são chamados de bloco A/D e trabalham pelo princípio de amostragem e quantização. E o circuito responsável pela conversão do sinal de Digital para Analógico é chamado de conversor D/A. Na figura acima pode-se identificar estes dois blocos. A chave representa a amostragem. O controlador propriamente dito é o bloco D(Z), que no caso é digital.
Amostragem de Sinais:
Seja um sinal analógico como o da figura abaixo. Para podem os convertê-lo em digital não é possível aplicá-lo diretamente à entrada do conversor A/D, porque o processo de conversor leva um certo tempo. Assim o que se deve fazer é colher amostras do sinal analógico de tempos em tempos e então enviá- las para o conversor A/D. Assim o sinal analógico amostrado fica como na figura abaixo:
Sinal Analógico Amostrador Sinal Amostrado
Percebe-se que cada amostra está espaçada da outra de um certo valor, chamado de TS. Esse valor TS é chamado de intervalo de amostragem. A fórmula abaixo define uma das propriedades mais importantes da amostragem a chamada freqüência de amostragem, simbolizada por FS.
FS = 1 / TS , onde TS é o intervalo entre as amostras. Para que o controle digital funcione corretamente a amostragem deve ser bem feita, ou seja, ele deve “representar” bem o sinal que foi amostrado. Existe um critério para se amostrar sinais chamado de critério de Nyquist ou Shanon, que determina que a freqüência de amostragem FS deve ser pelo menos duas vezes a maior freqüência do sinal que está sendo amostrado. Quando o sinal a ser amostrado não é senoidal, a freqüência máxima do sinal pode ser verificada por meio de nstrumentosi especiais chamados de analisadores de espectro. Uma vez que o sinal foi amostrado, à uma freqüência igual a definida pelo critério de Nyquist, aplica- se cada amostra ao conversor A/D para a conversão propriamente dita. O processo de conversão consiste em comparar o sinal com uma série de pesos. Cad peso é sempre o dobro do anterior e cada peso corresponde- se um bit. Ou seja, existem tantos pesos quantos bit‟s no conversor A/D. Se a amostra for maior que o peso, o bit correspondente ao peso será iguala “1”, se for menor o bit será “0”. E isto é feito para cada peso. Assim na saída temos uma seqüência de “0” e “1” que representam o valor digital da amostra, conforme a figura abaixo:
0 1 0 TS A/D 0
Amostras. . . 0 1
Conversor A/D de N bit’s Valor digitalizado