¡Descarga Electric Spring Systems in Microgrids: Voltage Control and Power Loss Reduction y más Guías, Proyectos, Investigaciones en PDF de Procesamiento de Señales Digitales solo en Docsity!
mathematics
Article
A Robust Electric Spring Model and Modified
Backward Forward Solution Method for Microgrids
with Distributed Generation
Guillermo Tapia-Tinoco 1 , David Granados-Lieberman 2 , David A. Rodriguez-Alejandro 2 , Martin Valtierra-Rodriguez 3 and Arturo Garcia-Perez 1,* (^1) Engineering Division, University of Guanajuato, Campus Irapuato-Salamanca, Carretera Salamanca-Valle de Santiago km 3.5 + 1.8 km, comunidad de Palo Blanco, C.P. 36885 Salamanca, Gto., Mexico; guillermo.tapia@enap-rg.org (^2) ENAP-Research Group, Department of Electromechanical Engineering, National Technological Institute of Mexico, Instituto Tecnológico Superior de Irapuato (ITESI), Carr. Irapuato-Silao km 12.5, Colonia el Copal, C.P. 36821 Irapuato, Gto., Mexico; david.granados@enap-rg.org (D.G.-L.); david.rodriguez@enap-rg.org (D.A.R.-A.) (^3) ENAP-Research Group, Faculty of Engineering, Autonomous University of Queretaro, Campus San Juan del Río, Río Moctezuma 249, col. San Cayetano, C.P. 76807 San Juan del Río, Qro., Mexico; martin.valtierra@enap-rg.org ***** Correspondence: arturo@ugto.mx
Received: 1 July 2020; Accepted: 5 August 2020; Published: 10 August 2020
���������� �������
Abstract: The electric spring (ES) is a contemporary device that has emerged as a viable alternative for solving problems associated with voltage and power stability in distributed generation-based smart grids (SG). In order to study the integration of ESs into the electrical network, the steady-state simulation models have been developed as an essential tool. Typically, these models require an equivalent electrical circuit of the in-test networks, which implies adding restrictions for its implementation in simulation software. These restrictions generate simplified models, limiting their application to specific scenarios, which, in some cases, do not fully apply to the needs of modern power systems. Therefore, a robust steady-state model for the ES is proposed in this work to adequately represent the power exchange of multiples ESs in radial micro-grids (μGs) and renewable energy sources regardless of their physical location and without the need of additional restrictions. For solving and controlling the model simulation, a modified backward–forward sweep method (MBFSM) is implemented. In contrast, the voltage control determines the operating conditions of the ESs from the steady-state solution and the reference voltages established for each ES. The model and algorithms of the solution and the control are validated with dynamic simulations. For the quasi-stationary case with distributed renewable generation, the results show an improvement higher than 95% when the ESs are installed. On the other hand, the MBFSM reduces the number of iterations by 34% on average compared to the BFSM.
Keywords: electric spring; microgrids; distributed generation; renewable energy sources; modified backward–forward sweep method
1. Introduction The integration of renewable energy sources, the technological evolution of electric vehicles, and the development of more efficient and higher capacity energy storage systems are some alternatives to restrain CO 2 gas emissions and increase sustainable development [ 1 ]. To achieve these objectives, the transition from the actual electrical system to a smart grid (SG) requires the improvement of the
Mathematics 2020 , 8 , 1326; doi:10.3390/math8081326 www.mdpi.com/journal/mathematics
reliability, security, and efficiency of the electrical system [ 2 ]. Furthermore, the migration to a SG involves the flexible handling of the power intermittences associated with the stochastic nature of renewable energy sources (RESs) [ 3 ], implementation of monitoring systems, and control schemes that guarantee bidirectional power flow and optimal operation of the SG [ 4 ]. An alternative that the electrical industry has been using to modernize the electrical distribution network is the implementation of electrical microgrids (μGs) [ 5 , 6 ]. The μGs are defined as small local distribution systems that operate with the same philosophy of SGs. They promote the distributed generation (DG) and the integration of RESs such as small hydropower units, wind turbines, and photovoltaic arrays; yet, non-RESs such as fuel cells, gas turbines, and combined cycle units are sometimes considered as well [ 7 , 8 ]. Besides, the μGs can be connected to the electrical grid or operate independently (standalone mode) during external faults or disturbances. This versatility increases local reliability, reduces power losses, and improves power quality [ 9 ]. One of the significant challenges of integrating DG into the electrical grid is related to the abrupt power variations caused by the weather dependence of RESs. These unexpected power variations can cause congestion in the electrical network when there is a surplus of power or lack of dispatch, affecting the stability of the electrical network [ 10 ]. In this sense, the Electric Spring (ES) is a new device that has emerged as a promising alternative to increase the flexibility of the electrical system since it has the particular feature of demand-side load management. This feature allows the ES to manage energy demand locally, increasing the stability of the electrical network and damping both the power oscillations produced by RESs and the dynamic variations of loads [11]. In recent years, the interest of the scientific community to study the impact of ESs on the electrical network has grown. These studies have been oriented to the design and implementation of collaborative control schemes that improve voltage regulation [ 12 – 14 ], keep the frequency within safe operating ranges [ 15 , 16 ], and operate the electrical systems in optimal conditions to reduce power losses [ 17 , 18 ]. These situations are studied using simulation models of radial μGs or radial distribution systems, which are divided into two main groups: time-domain simulation models and steady-state simulation models. Time-domain simulations are implemented in specialized electromagnetic transient software and are appropriate when it is required to analyze the behavior of the network during transients. However, they have as a drawback the requirement of a tremendous computational effort which, under certain conditions, limits the analysis of large-scale electric systems [19,20]. On the other hand, steady-state simulation models are widely used to analyze large-scale electric systems, and they are suitable to evaluate the slow dynamic of electromechanical systems using phasor solution methods. The steady-state analyses for the ES that haven been reported in the literature carry out different studies to understand the behavior and interaction of ES with the electrical network. For instance, the steady-state analysis performed in [ 21 ] shows experimentally the operating conditions of the ES that determine the exchange of active and reactive power with the electrical network. In [ 22 ], the operating range of the ES is analyzed according to its parameters, and a control scheme is established to minimize the action of the ES for regulating the voltage in the point of common coupling (PCC). The design of a dynamic controller to regulate the active and reactive power exchange between the ES and the electrical network is proposed in [ 23 ]; for the controller design, the authors carried out the steady-state analysis of a simplified electrical network and a single ES. From the steady-state model, the geometric relationships between the electrical variables involved were derived. As a result, a control law that depends on the parameters of the electrical network and the electrical variables at the PCC is obtained. In [24], a steady-state model to describe the exchange of active and reactive powers in the ES is also obtained. The simulation model is implemented with a test network and its impact is evaluated when it operates in conjunction with the RES and electric vehicles. In [ 25 ], a steady-state model of the ES and its solution and control algorithms for the implementation of study cases with multiple ES are proposed. The presented model decouples the SL into a virtual generator and an equivalent impedance connected to the PCC. The exchange of power with the electrical network for both devices is modeled from their power equations. The virtual generator represented by a voltage source is used to achieve the power balance in the PCC associated with the operation of the SL.
Mathematics 2020 , 8 , 1326 4 of 31
VES_ref by 90 degrees, causing the ES to operate in capacitive mode and, consequently, increasing Vs; otherwise, if the sign is negative, the ES operates in inductive mode, decreasing Vs [29].
capacitive or inductive mode is determined by the sign of V ES_mag. If the sign is positive, I NC leads V ES_ref by 90 degrees, causing the ES to operate in capacitive mode and, consequently, increasing Vs ; otherwise, if the sign is negative, the ES operates in inductive mode, decreasing Vs [29]. The configuration of the non-critical load, ZNC , and the ES is known as a smart load (SL). The SL is capable of controlling the active and reactive power exchanged with the electrical grid, even if the ES only operates in reactive compensation mode. The modification of the V ES in both modes of operation has repercussions on the voltage applied to the non-critical load, V NC. Therefore, the power consumed by the non-critical load can be controlled and the ES simultaneously regulates the voltage at the PCC, managing any intermittence in the RES locally [30].
Figure 1. Electric spring dynamic model.
2.2. ES Frequency-Domain Model The frequency-domain modeling involves the development of new ES models that adequately and precisely describe the power exchange of the ES with the electrical grid. Unlike time-domain models, in the frequency-domain models, it is not possible to implement controllers that automatically respond to the disturbances and adjust the ES operating point.; therefore, to derivate a steady-state model, the power exchange and the operating principle must be included. These models are developed using phasor representations. The ES models reported in the literature are obtained from simplified electrical circuits, such as the one shown in Figure 2a [21,24]. The electrical network is represented by a voltage source, VG
and its equivalent impedance, ZL. The ES is modeled as a controlled voltage source VES
, which is connected in series between the non-critical load, ZNC , and the PCC (^) Vs
. These models describe the power exchange of the ES with the electrical network, but they have the limitation that they are valid only when the SL is grid-tied at the farthest node of the electrical network [31]. In order to implement this model in simulation software, it is necessary to add additional restrictions that depend on the ES operation mode, the power factor of the loads, and the particular conditions of any study case.
Figure 1. Electric spring dynamic model.
The configuration of the non-critical load, ZNC, and the ES is known as a smart load (SL). The SL is capable of controlling the active and reactive power exchanged with the electrical grid, even if the ES only operates in reactive compensation mode. The modification of the VES in both modes of operation has repercussions on the voltage applied to the non-critical load, VNC. Therefore, the power consumed by the non-critical load can be controlled and the ES simultaneously regulates the voltage at the PCC, managing any intermittence in the RES locally [30].
2.2. ES Frequency-Domain Model The frequency-domain modeling involves the development of new ES models that adequately and precisely describe the power exchange of the ES with the electrical grid. Unlike time-domain models, in the frequency-domain models, it is not possible to implement controllers that automatically respond to the disturbances and adjust the ES operating point.; therefore, to derivate a steady-state model, the power exchange and the operating principle must be included. These models are developed using phasor representations. The ES models reported in the literature are obtained from simplified electrical circuits, such as the one shown in Figure 2a [ 21 , 24 ]. The electrical network is represented by a voltage source,
→ VG and its equivalent impedance, ZL. The ES is modeled as a controlled voltage source
→ VES, which is connected in series between the non-critical load, ZNC, and the PCC
→ Vs. These models describe the power exchange of the ES with the electrical network, but they have the limitation that they are valid only when the SL is grid-tied at the farthest node of the electrical network [ 31 ]. In order to implement this model in simulation software, it is necessary to add additional restrictions that depend on the ES operation mode, the power factor of the loads, and the particular conditions of any study case.
Mathematics 2020 , 8 , 1326 5 of 31
and its equivalent impedance, ZL. The ES is modeled as a controlled voltage source V (^) ES , which is connected in series between the non-critical load, ZNC , and the PCC (^) Vs
. These models describe the power exchange of the ES with the electrical network, but they have the limitation that they are valid only when the SL is grid-tied at the farthest node of the electrical network [31]. In order to implement this model in simulation software, it is necessary to add additional restrictions that depend on the ES operation mode, the power factor of the loads, and the particular conditions of any study case.
Figure 2. Electric spring steady-state model: ( a ) simplified electrical circuit and ( b ) phasor diagram.
Figure 2b shows the phasor diagram on the PCC of Figure 2a. In the analysis, it is considered that the non-critical load has a lagging power factor, and the ES operates in capacitive operation mode.
The geometric relationships between the phasors
→ Vs,
→ VNC,
→ VES,
→ I (^) NC, and the non-critical load angle, φNC, is given by [31]: Vs^2 = (VNC − VES sin φNC)^2 + (VES cos φNC)^2. (1) By solving Equation (1) for VNC, the following expression is obtained.
VNC = ±
Vs^2 − (VES cos φNC)^2 + VES sin φNC. (2)
Once VNC is obtained, the next step is to calculate the reactive powers of the ES, QES, and the non-critical load, QNC. These are given in Equations (3) and (4), respectively
QES = VESINC sin(− 90 ◦) = −VESINC = − VESVNC ZNC
QNC = VNCINC sin(φNC) =
V^2 NC
ZNC
sin(φNC). (4)
The expression for reactive power of the smart load (QSL) is given below
QSL = QES + QNC. (5)
Substituting (2)–(4) in (5), the Equation (6) is obtained
QSL =
−VES
( ±
√ Vs^2 −(VES cos φNC)^2 +VES sin φNC
)
ZNC +
( ±
√ Vs^2 −(VES cos φNC)^2 +VES sin φNC
) 2
ZNC sin(φNC).^ (6)
Equation (6) represents the steady-state model associated with the reactive power exchange of the SL with the electrical network. It can be seen that the model depends on the magnitudes of Vs, VES, as well as the non-critical impedance, ZNC, and its power factor. This equation is valid only when the ES operates in capacitive mode and the power factor of the non-critical is lagging. If the operation mode changes or the critical load is modified, the equation would not be applicable and, consequently, it would be necessary to derive a new equation for those particular operating conditions. Therefore, it is necessary to develop new mathematical models of the ES that adequately represent its behavior, including its different operation modes and considering external disturbances. These considerations will allow for studying the impact of multiple distributed ESs in a μG and the inclusion of collaborative controls in DG to improve the reliability of the μGs.
3. Model Obtaining In order to obtain the proposed steady-state model, the simulation diagram shown in Figure 3 is proposed. It involves DG and the collaborative operation of multiple ESs distributed into the μG.
each of the RESs (PREN 1 , PREN 2 ,... , PRENn). In each iteration, the currents delivered by the current sources are calculated by Equation (7) to inject active power only.
IRENx = PRENx Vsx
where the subscript x is associated with the physical location of the current source and takes the values x = 1, 2,... , n, when the MBFWM algorithm converges and the steady-state solution is obtained. An additional algorithm is in charge of controlling the voltage of each ES. The voltage control algorithm receives as input the steady-state solution calculated by the MBFSM and adjusts the operating conditions of the ESs until reaching the reference voltages (Vs_ref 1 , Vs_ref 2 ,... , Vs_refn). The validation of the proposed model is carried out by comparing the obtained results with the ones obtained by the solution in the steady-state condition of the time-domain-based model for the μG under the same operating conditions. For the time-domain simulation, the ES is implemented by using its dynamic model (see Figure 3b). At the same time, the current sources associated with the DG are replaced by the dynamic model depicted in Figure 3c. Each current source consists of a DC-AC converter and a low-pass filter (Lf 1 - Cf-Lf 2 ), operating as a controlled current source. The magnitude and phase for the current signal are calculated from the delivered active power and the voltage in the PCC.
3.1. Steady-State ES Mathematical Model The dotted rectangle in Figure 4 contains the elements and variables involved in the derivation of the ES mathematical model. This part corresponds to a general section of the circuit shown in Figure 3a. There are three nodes involved in obtaining the model, which are indicated by different subscripts (i, j, and k). The subscript j represents the physical location of the ES, while i and k are used to indicate the neighboring nodes. The current contributions of all the elements connected to the PCC, → Vsj, are considered. It can be seen that the components connected to
→ Vsj are those that are usually included in the steady-state models, e.g., the critical loads Zj and the SL. To increase the robustness of the model, the injection of active power into the PCC,
→ I (^) REN j, and the effect of external disturbances associated with voltage variations,
→ Vsi, and current fluctuations
→ I (^) jk are included.
→ Vsi in the model involves the voltage variations attributed to
→ VG or the power variations at nodes that precede the location of the ES, and the impact on its operation.
→ I (^) jk corresponds to the current demanded by either the loads or other elements connected in the μG. On the other hand, when
→ I (^) jk is included, the effect of power variations on the rest of the network and the impact that they have on the operation of the ES are also included in the model.
Mathematics 2020 , 8 , x FOR PEER REVIEW 7 of 32
The validation of the proposed model is carried out by comparing the obtained results with the ones obtained by the solution in the steady-state condition of the time-domain-based model for the μG under the same operating conditions. For the time-domain simulation, the ES is implemented by using its dynamic model (see Figure 3b). At the same time, the current sources associated with the DG are replaced by the dynamic model depicted in Figure 3c. Each current source consists of a DC- AC converter and a low-pass filter ( L f 1 - Cf - L f 2 ), operating as a controlled current source. The magnitude and phase for the current signal are calculated from the delivered active power and the voltage in the PCC.
3.1. Steady-State ES Mathematical Model The dotted rectangle in Figure 4 contains the elements and variables involved in the derivation of the ES mathematical model. This part corresponds to a general section of the circuit shown in Figure 3a. There are three nodes involved in obtaining the model, which are indicated by different subscripts ( i , j , and k ). The subscript j represents the physical location of the ES, while i and k are used to indicate the neighboring nodes. The current contributions of all the elements connected to the PCC, Vs j
, are considered. It can be seen that the components connected to Vsj
are those that are usually included in the steady-state models, e.g., the critical loads Zj and the SL. To increase the robustness of the model, the injection of active power into the PCC, IRENj
, and the effect of external disturbances
associated with voltage variations, Vsi
, and current fluctuations Ijk
are included. Vsi
in the model involves the voltage variations attributed to VG
or the power variations at nodes that precede the location of the ES, and the impact on its operation. Ijk
corresponds to the current demanded by either the loads or other elements connected in the μG. On the other hand, when Ijk
is included, the effect of power variations on the rest of the network and the impact that they have on the operation of the ES are also included in the model.
Figure 4. Circuit for the steady-state ES mathematical model.
A steady-state analysis is performed on the elements found within the dotted rectangle in Figure
4 to obtain the ESs mathematical model. By applying Kirchhoff’s Voltage Law (KVL) between Vsi
and Vsj
, the following equation is obtained.
Vsi = I Z ij Lj + Vsj
where (^) Iij
is the current that flows through the distribution line impedance, ZLj. Applying a Kirchhoff’s
Figure 4. Circuit for the steady-state ES mathematical model.
A steady-state analysis is performed on the elements found within the dotted rectangle in Figure 4 to obtain the ESs mathematical model. By applying Kirchhoff’s Voltage Law (KVL) between
→ Vsi and → Vsj, the following equation is obtained. → Vsi =
→ I (^) ijZLj +
→ Vsj (8)
where
→ I (^) ij is the current that flows through the distribution line impedance, ZLj. Applying a Kirchhoff’s Current Law (KLC) at the node
→ Vsj, the following expression is obtained, → I (^) ij =
→ I (^) j +
→ I (^) NCj −
→ I (^) REN j +
→ I (^) jk, (9)
where
→ I (^) j,
→ I (^) NCj,... , and
→ I (^) jk correspond to the currents in the critical load, non-critical load, the current delivered by the RESs, and the current demanded by other elements of the μG. The current
→ I (^) j is expressed in terms of the voltage
→ Vsj and the impedance Zj as follows:
→ I (^) j =
→ Vsj Zj
By substituting Equations (9) and (10) in Equation (8), it is obtained that: → Vsi =
→ Vsj
[ Z
Lj Zj
]
→ I (^) NCj − ZLj
→ I (^) REN j + ZLj
→ I (^) jk. (11)
Expressing the active power delivered for the renewable energy source, PRENj, in terms of
→ (^ Vsj^ and → I (^) REN j
in polar form, it results that:
PREN j =
V sj
I (^) REN j
Vsj
∣∣θsj
IREN j
∣∣−θsj
where θsj is the phase angle of
→ Vsj and
I (^) REN j
is the conjugated of the current
→ I (^) REN j.
From Equation (12),
→ I (^) REN j can be represented in terms of the phasor
→ Vsj as given in Equation (13)
→ − I REN j =^ IREN j
∣∣θsj = PREN Vs^2 j
→ − V s j.^ (13)
Equations (14) and (15) give the
→ Vsj and
→ I (^) jk phasors represented in polar form, respectively. → − V sj = Vsj
∣∣θsj , (14)
→ − I (^) jk = Ijk
∣∣θjk , (15)
where θjk is the phase angle of the current
→ I (^) jk. Defining α = θsj − θjk, then
→ I (^) jk can be expressed in terms of
→ Vsj as shown in Equation (16)
→ − I (^) jk =
( I
jk Vsj
∣∣θjk − θsj
Vsj
∣∣θsj
( I
jk Vsj
∣− α
V sj. (16)
relationships involve four angles. The angle ϕ 1 is measured from
→ Vsj to
→ VG 1 , and the angle ϕ 0 is associated with the power factor of ZLj. The angle ϕ 4 is measured from
→ VG 1 to
→ Vsi, and finally, θ/2 is the angle between
→ I (^) NCj and
→ Vsj. When performing the analysis of the geometric relationships of the phasor diagrams in Figure 5,b, the mathematical model described by the next Equations (21)–(29) is obtained. This model differs from that reported in [ 23 ] in the calculation of VG 1 and ϕ 1 , while the rest of the geometric relationships remain unchanged. This fact is closely linked with the procedure to derive Equations (13) and (16),
which allowed finding a connection between
→ VG 1 and
→ Vsj. As a result, a model like the one expressed in Equations (19) and (20) is obtained. It can be seen in Equations (21) and (22) that the magnitude of VG 1 and ϕ 1 depend on the impedances connected to the PCC (ZLj and Zj), the active power, PRENj, the magnitude of the current Ijk, the magnitude of the voltage on the PCC, Vsj, and the angle α. Variations of any of these parameters will influence the calculation of their geometric relationships. Therefore, the modeling and implementation of the μG in simulation is not a trivial task. However, the BFSM provides an advantage in the implementation of the ES mathematical model. As previously mentioned, this solution technique starts at the node farthest from the μG and, employing the backward propagation, the voltages and currents are calculated until reaching the power supply. This advantage provided by BFSM allows the ES model to be implemented in any μG location without the need for additional restrictions. For instance, to calculate the geometric relationships of an ES connected to the PCC at node Vsj, the BFSM provides the values of
→ Vsj and
→ I (^) jk. The rest of the terms are parameters and operating conditions of the PCC, which are known.
VG 1 =
ZLj Zj
ZLjIjk Vsj
∣− α −
ZLjPREN j Vs^2 j
Vsj. (21)
ϕ 1 = arg
^1 +^
ZLj Zj
ZLjIjk Vsj
∣− α −
ZLjPREN j Vs^2 j
.^ (22)
The angle ϕ 0 depends on the power factor of ZLj as follows:
ϕ 0 = arg
ZLj
The ES operating conditions are defined by the parameter mj, and this parameter takes values in the range of [−1, 1] and determines the magnitude of Vsi and the angle θ according to the following relationships. Vsi =
mj
a^2 + b^2 + V^2 G 1 + b. (24)
θ = sin−^1
mj
− tan−^1
b a
The parameters a and b are used to simplify Equations (24) and (25). They are given by:
a =
VG 1 Vsj RNCj
R^2 Lj + X Lj^2 cos(ϕ 0 + ϕ 1 ). (26)
b =
Vs^2 j
R^2 Lj + X^2 Lj
2 R^2 NCj
VG 1 Vsj RNCj
R^2 Lj + X^2 Lj sin(ϕ 0 + ϕ 1 ). (27)
The magnitude of the ES voltage is calculated by Equation (28). If the non-critical load has a unity power factor, the second term of the equation is omitted. If it has a lagging power factor, the sign is negative, and if it is leading, the sign is positive.
VESj = Vsj sin
( (^) θ 2
± I 3 XNCj. (28)
The angle ϕ 4 is calculated by Equation (29)
ϕ 4 = sin−^1
Vsj
R^2 j + X^2 j RNCjVsi cos
( (^) θ 2
cos
( (^) θ 2
It can be seen in Figure 5a,b that the geometric relationships take as reference the phasor
→ I (^) NCj. The reference was established to simplify the calculation of geometric relationships. However, it is necessary to calculate the exact value of the phase angle for the ES voltage, θESj. This value is obtained by the Equation (30) and is calculated from θSj. The value of θSj is provided by the MBFSM in the backward propagation process. If the angle θ takes a positive value, the ES operates in inductive mode; while for a negative value, the operating mode is capacitive.
θESj = θsj − θ 2
In the same way, the phase angle for the voltage Vsi, θsi is calculated taking as reference θSj in the next equation. θsi = θsj + ϕ 1 + ϕ 4. (31) Finally, to calculate the current and continue with the backward propagation process, Equation (9) is used. The geometric relationships described in Equations (21)–(31), along with the MBFSM solution technique, allow analyzing the joint operation of RES and ESs distributed in the μG. MBFSM is an iterative process that calculates the steady-state solution of the μG until it converges or reaches a maximum number of iterations. The following subsection describes in detail the implementation of the solution algorithm and the proposed modification to the traditional BFSM.
3.2. Modified Backward–Forward Sweep Method The BFSM has been extensively used for the steady-state solution of radial electric networks due to its accuracy and fast convergence. There are three variants in the method that depends directly on the type of electrical quantities used: (a) the current summation method, (b) the power summation method, and (c) the admittance summation method [ 32 ]. The BFSM procedure is depicted in Figure 6a. It starts with a flat solution in which the voltage at all nodes takes the same value. The backward sweep begins at the farthest node of the radial grid and moves toward the source node computing the currents or power flow in each branch. The forward sweep computes the voltage drop in the electrical grid from the currents or power flows calculated in the backward sweep. The nodal voltages are updated from the voltage source to the last node of the electric grid. During the forward sweep process, the currents or powers calculated in the backward sweep remains constant. The values calculated in the forward sweep correspond to the new voltage values used in the backward sweep for the next iteration. The convergence is reached when the mismatch voltage is less than the specified tolerance.
subscript n. The initial condition of the farthest voltage in the μG is assigned, Vsn. It can be seen from the flowchart in Figure 6b that forward propagation is omitted because, in the backward propagation, the currents and node voltages are simultaneously calculated until reaching the power supply, VG. If a node, where an ES is located, is reached during the backward propagation process, the model presented in Equations (21)–(31) is employed to calculate the geometric relationships of the electrical quantities in the PCC. As the voltage VG calculated in the backward propagation may not correspond to the real voltage of the power supply, VGn, the output error, ErrSal, is calculated as the absolute value of the difference between VG and VGn. If ErrSal is less than a tolerance, tol, the algorithm stops. The value assigned to tol directly impacts the accuracy of the solution and execution time. The tuning of this parameter must be carefully done as it depends on the dimensions of the μG and the number of ESs and RESs. In this work, a value of tol = 1 × 10 −^12 was used, which was determined through an exhaustive experimentation. If the condition is not met, a new value of Vsn is calculated for the next iteration. The new value of Vsn is calculated by dividing the current value by an adjustment gain, K. The gain K is calculated by the ratio of the absolute value of VG and VGn. The process is repeated until the maximum number of iterations, Niter, is reached, or the algorithm converges. The MBFSM accurately provides the steady-state solution of the μG. This solution is calculated from the operating conditions of the ESs and the active power injected by each of the RES; therefore, it is possible to study the impact that DG has on μG. Another area of opportunity for the proposal is provided by the ability to establish the operating conditions of the ESs. These features allow analyzing the individual or joint operation of the ESs and developing global control schemes that face the challenges of modern electric power networks. In this sense, the following subsection explains in detail the voltage control scheme proposed in this work, which is in charge of regulating the operating conditions of multiple ESs distributed in the μG.
3.3. Voltage Control Algorithm Applied to Multiple ESs Figure 7 depicts the flowchart for the voltage control algorithm of a group of ESs distributed in the electric grid. This algorithm controls the interaction of all the elements in Figure 3a. The algorithm starts by initializing the operation conditions of all the ESs (m 1 , m 2 ,... , my) and their respective reference voltage (Vs_ref 1 , Vs_ref 2 ,... , Vs_refy). The magnitude of the active powers supplied for the current sources are established, which are kept constant until the algorithm converges (PREN 1 , PREN 2 ,
... , PRENx). The algorithm computes the steady-state solution of the μG in each iteration using the MBFSM. Only the voltages of the nodes where the ESs are located are extracted from the steady-state solution (Vs 1 , Vs 2 ,... , Vsy). The root mean square error, Err, is calculated from the Vsβ and Vs_refβ, where β =1,2,... , y. If Err is less than the tolerance, tolc, or the voltage magnitude of all ESs reaches its maximum value, Vmax, then the algorithm stops. Vmax is directly related to the magnitude of the voltage source on the DC bus. In one case of the two previous conditions is not fulfilled, it is necessary to modify the operating conditions of each one of the ESs. The following procedure applies to each situation individually. The ESs that reached their Vmax are identified, and their mβ are not modified in this iteration. For the ESs that did not reach Vmax, the sign is obtained from the subtraction (Vsβ − Vs_refβ). If the sign is positive, it means that the voltage Vsβ is higher than Vs_refβ; therefore, it is necessary to consume a higher amount of reactive power to decrease the voltage at node Vsβ, which is achieved by increasing mβ, having as a limit a maximum value of 1. Otherwise, mβ must be reduced to a minimum value of −1. This action is associated with an increment in the reactive power injected by the ES. The process is repeated until the solution converges or the maximum number of iterations has been reached.
Mathematics 2020 , 8 , x FOR PEER REVIEW 14 of 32
Figure 7. Voltage control flow chart.
Once the μG voltage control and the solution algorithms have been implemented, it is necessary to validate the ES model under different operating conditions. In the next section, the obtained results for the proposal are presented.
4. Study Cases and Results Figure 8 shows the μG implemented to carry out the model validation. It can be seen that it has the topology shown in Figure 3. The assignment of subscripts in the elements corresponds to the criteria described in Section 3. The μG is composed of a power supply, V G , five distribution lines ( ZL 1 , ZL 2 , ZL 3 , ZL 4 , and ZL 5 ), three ESs ( ES2 , ES4 , and ES5 ), two RES ( I REN 2 and I REN 5 ) with powers ( P REN 2 and PREN 5 ), three non-critical loads ( ZNC 2 , ZNC 4 , and ZNC 5 ), and five loads ( Z 1 , Z 2 , Z 3 , Z 4 , and Z 5 ), where Z 2 , Z 4 , and Z 5 are the critical loads. The five node voltages are indicated as ( Vs 1 , Vs 2 , Vs 3 , Vs 4 , and Vs 5 ).
Figure 7. Voltage control flow chart.
Once the μG voltage control and the solution algorithms have been implemented, it is necessary to validate the ES model under different operating conditions. In the next section, the obtained results for the proposal are presented.
4. Study Cases and Results Figure 8 shows the μG implemented to carry out the model validation. It can be seen that it has the topology shown in Figure 3. The assignment of subscripts in the elements corresponds to the criteria described in Section 3. The μG is composed of a power supply, VG, five distribution lines (ZL 1 , ZL 2 , ZL 3 , ZL 4 , and ZL 5 ), three ESs (ES2, ES4, and ES5), two RES (IREN 2 and IREN 5 ) with powers
In order to quantitively evaluate the performance of the MBFSM against the BFSM, a study case with different operating conditions is implemented. The μG of Figure 8 and the parameters of Table 1 are used. A set of n = 100 random values given by xj are generated for the powers injected by the RES (PREN 2 and PREN 5 ). The active power is in the range of 0 to 1000 W, which corresponds to the maximum and minimum values used in the next study cases of Sections 4.1 and 4.2. These arrays are mathematically represented by Equation (32). In the same way, 100 random values are generated for the operating conditions of the ESs. (m 2 , m 4 y m 5 ). These values are contained in the range [−1, 1], which allows the ESs to operate in inductive or capacitive compensation mode. The mathematical representation of these arrays is shown in Equation (33).
PnRENi =
[x 1 ; x 2 ;... ; xn] } xj^ ∈ <,^ ∀j^ =^ 1, 2,^...^ ,^ n xj ∈ [0, 1000]W ∀i = 2, 5.
mni =
[x 1 ; x 2 ;... ; xn]
xj ∈ <, ∀j = 1, 2,... , n xj ∈ [−1, 1] ∀i = 2, 4, 5
The convergence criterion used in the BFSM is defined by Equations (34)–(36) [ 34 ]. The voltage errors (∆Vi) for all nodes in the electrical network are calculated from the voltages in the current iteration (k) and the previous iteration (k − 1), as shown in Equation (34). A convergence error (err) is defined. If Equations (35) and (36) are satisfied for all nodes, the method stops, and the steady-state solution is obtained. ∆Vi = Vski − Vsk i −^1 ∀i = 1, 2,... , n (34) ∣∣ ∣real(∆Vi)
∣ (^) < err ∀i = 1, 2,... , n (35) ∣∣ ∣imag(∆Vi)
∣ < err ∀i = 1, 2,... , n (36) The convergence criterion implemented for the MBFSM differs from that used in the BFSM. This criterion has been extensively discussed in Section 3.2 and is represented by:
|VG − VGn| < err (37)
Table 3 contains the results obtained for different convergence errors. The smallest convergence error is 1 × 10 −^1 , and the maximum one is 1 × 10 −^12. For each method, the maximum, minimum, and average iterations are extracted, considering the 100 samples from the test bench. It can be seen that for all the convergence errors analyzed, the MBFSM obtains the solution in a smaller number of iterations, achieving a reduction of 34.9% in all the cases, which demonstrates the improvement in the computational effort when implementing the MBFSM.
Table 3. Comparison of the computational effort of solution algorithms. BFSM Iterations MBFSM Iterations Reduction of Average Iterations (%) err Max Min Average Max Min Average 1 × 10 −^1 5 3 4 3 1 3 25. 1 × 10 −^2 7 3 5 4 2 3 40. 1 × 10 −^3 9 3 6 5 2 4 33. 1 × 10 −^4 10 4 8 6 3 5 37. 1 × 10 −^5 12 5 9 7 3 6 33. 1 × 10 −^6 14 5 10 7 4 6 40. 1 × 10 −^12 21 9 17 12 7 11 35. Average 34.
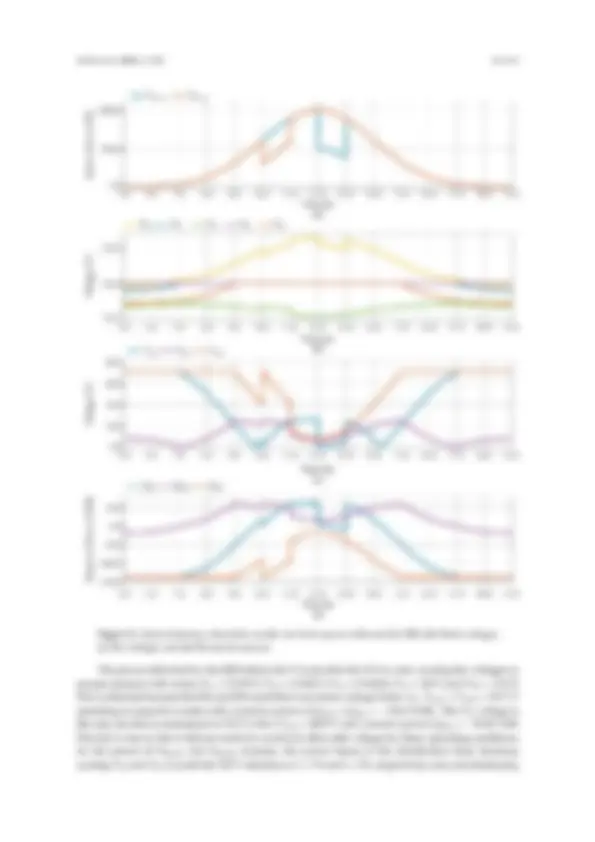
4.1. Study Case: Constant Active Power and Changes in Reference Voltages In this study case, the active power injected by the RES is kept constant, and the reference voltages of the ESs are modified. In this way, the source of the disturbances is fully identified, and the effect that it has on the μG is analyzed. The study case is divided into three time-intervals to show the different operating conditions of the ESs. The duration time of the intervals was determined based on the transient response of the μG. The time to reach the steady state depends on the severity of the disturbance and the collective action of the devices that conform to the μG. Therefore, this time can vary from one interval to another. In order to unify the criteria, it was adjusted to a value of 75 s, which was obtained experimentally. The active power injected by the RESs remains constant at the values PREN 1 = PREN 2 = 500 W. These values represent approximately 70% of the energy consumed in the μG under nominal conditions. Therefore, it is possible to reduce the power losses and adjust the reference voltages of the ESs to values close to the nominal voltage of the μG. Figure 9 shows the behavior of the electrical quantities for the nodes Vs 2 , Vs 4 , and Vs 5 , which correspond to the location of the ESs. The results obtained with the proposed steady-state model are identified with the subscript model. On the other hand, the results of the dynamic simulation are presented using root mean squarer values (RMS) and instantaneous values. When it corresponds to an RMS value, the dynamic subscript is added, and when the electric variable corresponds to an instantaneous value, it is indicated with the subscript dynamic_ins. In the first interval, the reference voltages of the ESs are set to 119 V. It can be seen in Figure 9a that all the ESs reach the established reference voltage (red line). To achieve the objective of controlling the voltages on the Vs 2 , Vs 4 , and Vs 5 nodes to a value of 119 V, the ESs modify their voltage, reactive power, and operation mode (see Figure 9b,c). It can be seen that all the electrical variables in the dynamic simulation start with zero initial conditions, and after a transient, it reaches the steady state. It is essential to note the differences in the transient duration times for each voltage even though they include a controller with the same gains. These differences are presented because all the elements are interconnected, and the action of one ES affects the others. However, the ES local controller allows the gradual adjustment until the steady state is reached. Regarding the steady-state model, this effect is already considered in the modeling and is adjusted using the solution and control algorithms. Results calculated with the steady-state model are represented as a constant value throughout the interval (black line). When comparing both results, it is verified that the results obtained by the steady-state model and the dynamic model are the same. From Figure 9b,c in the first interval, it can be seen that (i) ES2 operates in inductive mode with a voltage VES 2 = 40.29 V and absorbs a reactive power QES 2 = 90.23 VAR, (ii) ES4 also operates in inductive mode but with VES 4 = 22.17 V and QES 4 = 51.83 VAR, and (iii) ES5 operates in capacitive mode, delivering a reactive power QES 5 = −106.5 VAR and a voltage VES 5 = 49.12 V. The second interval shows the performance of the control algorithm when the ESs operate under saturation conditions. This effect occurs when the limits of voltage in the DC bus for the ES are exceeded. Regarding dynamic simulation, this limit is established by the element that powered the DC bus. If the required control action is higher than its limit, the ES voltage is adjusted to the maximum value and remains constant. If this restriction is not included in the steady-state model, the calculated ESs voltage will be wrong, and the collaborative operation of the ESs will not be appropriately modeled. In this regard, the reference voltage of the ES2 changes to Vs_ref 2 = 121 V, and the voltages of the other two ESs remain constant at Vs_ref 4 = 119 V and Vs_ref 5 = 119 V. The new value of Vs_ref (^2) affects the entire μG causing changes in the voltages and modes of operation of the ESs since they try to reach their established reference voltage. Only Vs 5 reaches 119 V, while the other voltages are controlled at the values, Vs 4 = 119.2 V and Vs 2 = 120.5 V. The modification in Vs_ref 2 causes the change in the operation of the ES from inductive mode to a capacitive mode in order to increase the voltage in its PCC. However, it reaches its maximum voltage VES 2 = 70.71 V and delivers a reactive power QES 2 = −137.9 VAR. The maximum voltage of the ESs is restricted by the voltage source that powered the DC bus. In this study case, it has a value of 100 V, and it is indicated in Figure 9b. The ES4 also
As was seen in the second interval, the modification in the reference voltage of one ES directly affects the other ESs. It is possible that in some cases, the ES reaches its operating limits, which is not adequate since this condition will not allow the appropriate handling of the power intermittencies in the μG. Therefore, it is essential to show that an increment or decrement of voltage is a collective task of the ESs, which is directly related to the assignment of the reference voltages of the ESs. At this point, the collaborative action is fundamental since if the reference voltages are arbitrarily adjusted, the ESs will have a conflict to establish their set points. This fact sometimes puts the ESs in saturation mode, resulting in an inadequate energy management which will directly impact on the μG’s voltage regulation and, consequently, its reliability. Finally, in the third interval, the reference voltages are adjusted to the values Vs_ref 2 = 122 V , Vs_ref 4 = 122.5 V, and Vs_ref 5 = 122 V. In this interval, none of the ESs reaches their maximum voltage, allowing the voltage control at the nodes Vs 2 , Vs 4 , and Vs 5 with their reference voltages, respectively. The ES2 remains in capacitive mode with voltage and reactive power VES 2 = 63.51 V and QES 2 = −132.3 VAR , respectively. The ES4 operates in capacitive mode, and its voltage and reactive power are VES 4 = 50.31 V and QES 4 = −112.4 VAR, respectively. The ES5 operates in inductive mode with a voltage and reactive power VES 5 = 1.695V and QES 5 = 4.112 VAR, respectively. The results presented in this study case were allowed to validate the ES model and the proposed algorithms subjected to modifications in their reference voltages. The steady-state comparison of both simulation models showed the same results in the three simulation intervals; however, the computational effort for the dynamic simulation model is higher because it is necessary to compute the transient response to get the steady-state. The proposed model and the algorithms for its solution and control described the collective operation of multiple ESs in μGs adequately. The tests carried out properly showed the action in reactive power compensation mode and the saturation effect on the ESs.
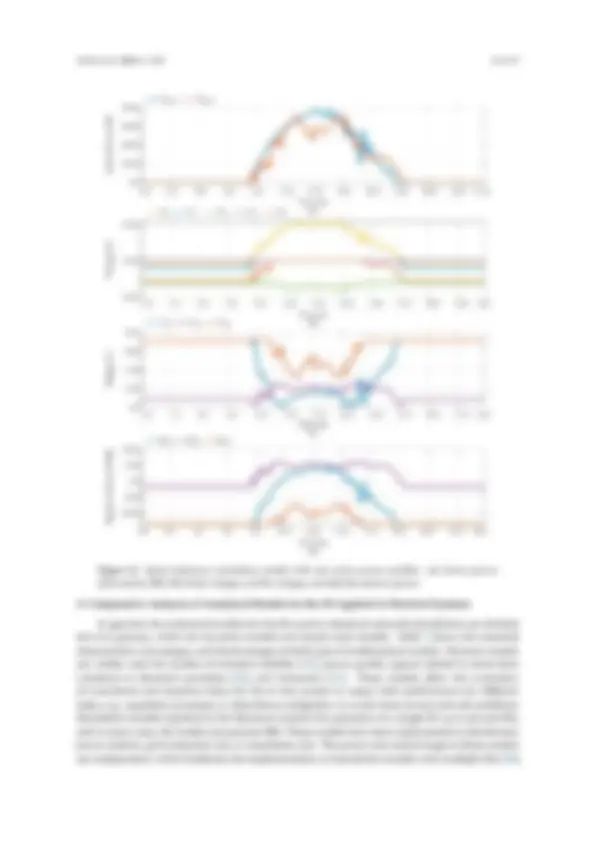
4.2. Study Case: Constant Reference Voltages and Changes in ACTIVE POwer In this case study, the reference voltages of the ESs are kept constant throughout the simulation, while the powers of PREN 2 and PREN 5 are modified. The purpose of this study case is to validate the model when it is subject to power disturbances, which is one of the most critical requirements in μGs with DG. The study case is divided into three intervals of 75 s. The values that PREN 2 takes in each interval is 500 W, 500 W, and 1000 W, while PREN 5 takes the values 0 W, 500 W, and 1000W. These values represent 35%, 70%, and 140% of the power consumed by the loads in nominal operating conditions. Therefore, the study case will allow observing the power handling of the ESs when there is a lack of dispatch (intervals 1 and 2) or surpluses of power (interval 3). The obtained results allowed demonstrating the proper operation of the proposal to manage power intermittencies and support voltage regulation locally simultaneously. The reference voltage of the ESs is adjusted to a fixed value Vs_ref 2 = Vs_ref 4 = Vs_ref 5 = 120V, which is determined based on the nominal voltage of the μG power supply. Figure 10a shows the voltages at the nodes Vs 2 , Vs 4 , and Vs 5. It can be seen that Vs 2 and Vs 4 are controlled at 120 V established by their reference voltages, regardless of the disturbances produced by the RES. On the other hand, Vs 5 in the first interval reaches a value of 119.7 V (maximum allowed voltage), and in the following two ranges, it reaches the reference voltage of 120 V. The voltages obtained in the dynamic simulation show a transient at the beginning of each time interval, and later the steady state is reached.
Mathematics 2020 , 8 , x FOR PEER REVIEW 21 of 32
Figure 10. Electric quantities at constant reference voltages and changes in the active power. ( a ) Node voltages, ( b ) ESs voltages, and ( c ) ES reactive power and operation modes.
Figure 10. Electric quantities at constant reference voltages and changes in the active power. ( a ) Node voltages, ( b ) ESs voltages, and ( c ) ES reactive power and operation modes.