Download Time Domain Component - Linear Dynamic Systems and Signals - Solved Exam and more Exams Electronic Circuits Analysis in PDF only on Docsity!
Sample Exam 4: Solutions
#1a) 4 6587�9;:=<?>;@BA�C�D
FE$<HG�
I
D
9 FJ$<HG�
�4LK�9;:
'M&NPORQTS
6587�9;:U;@
O
RQTS
VKH9;:
6M
WYX[Z�\
]9�>�^+@
W
A
O
Q
S
4 K 9 �:
'M�_
W
A
OQ
S`Qbac �deac
K
M
f_
O ac
W
A
OQ
S`Qgac
K
'M�_
O acOQih ac
W �j
O
Q
TS
65k9�>ml+@ C
n Fo
C
O
a c O Q ih ac
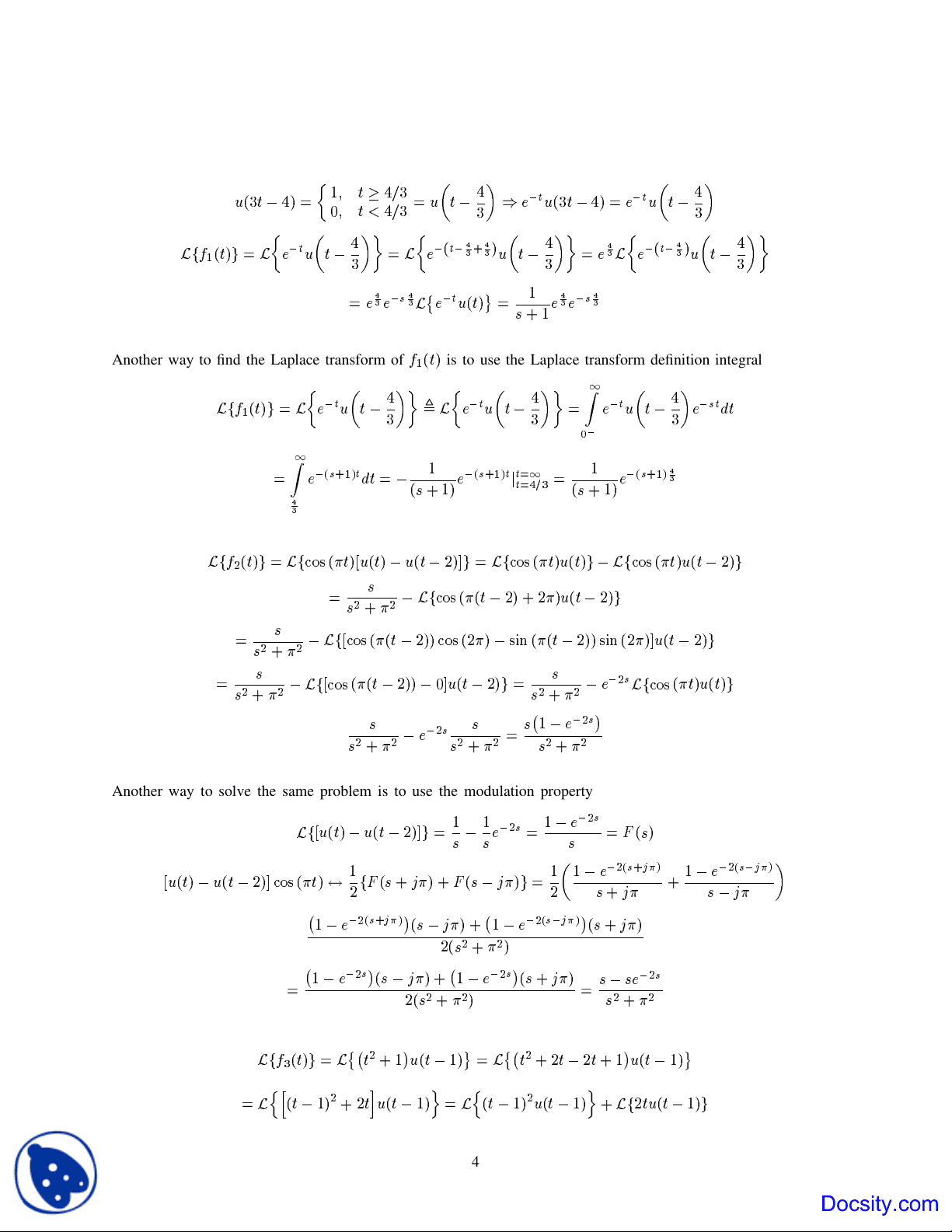
Another way to find the Laplace transform of
Z
\
p9�>
is to use the Laplace transform definition integral
WVXqZ \
]9�>�^+@
W
A
O
Q
S
4 K 9 �:
'M�_=r
W
A
OQTS
K
s:
M
f_
ut
v
wyx
O
Q
TS
K
M
O
Q
'hzS/{
@ t
v
a c
OQi|ph/d
/}
S
�@~: C
n Fo
C
�O Q'|]h/d
/}
S
q S] S- t
C
n go
C
�O Qi|ph/d
/}
a c
WVXqZ�
9�>^Y@
W
VXq-m
89�>y 4 65k9�>;:=4'5p9s:�>^+@
W
VXq��
`9�>4'5p9�>�^e:
W
LXm��
z9>4'5p9s:=�>�^
n
n
o
WVXq��
/5p9s:m>
o
�'>4'5p9s:�>^
n
n
o
WLX
85p9�:�>>
z�'>:
`5p9s:m>�>
/�'>8465]9;:�>�^
n
n
o
WVX
85p9�:�>>:
I
465]9;:m>y^Y@
n
n
o
O
Q
h
W VXq��
`9�>4'5p9�>�^
n
n
o
OQ
h n
n
o
n
C
OQ
h�
n
o
Another way to solve the same problem is to use the modulation property
WVX
65]9�>:=4'5p9�:�>z^L@ C
n
: C
n
O
Q
h
@ C
OQ
(^) h
n
@�f
n
4 65]9�>:465]9;:m>
z9> C
X
n Fo
o
n
>�^L@ C
K C
OQ
(^) |khdH q¡ }
n�o
o
C
O
Q
kh�QH q¡ }
n
M
C
OQ
|]hdH q¡ }
n
o
C
O
Q
kh�QH q¡ }
n Fo¢
H
n
o
C
OQ
h
n
o
C
O
Q
h
n Fo¢
H
n
o
n
n
O
Q
h
n
o
WLXmZ
p9�>�^L@
W
j
o
C
4 65]9;:
C
l @
W
j
o
[9s:�
o
C
4 65]9;:
C
l
W+¤*¥
]9;:
C
o
�9/¦m4'5p9s: C
W
]9�:
C
4 '5k9�: C
y§
o
W
LX
�9�465]9;:
C
>�^
4
¨&©�ªi«¬*�®�¯�°'±p®�²q³e´%¬eμm¶H±p®s·&¸�´&¸�²/°6±]®;·&¸q²�¹
¶�© ªi«
º�»
%¬Lμq¶¼±]®;·&¸q²/°6±]®;·$¸�²�¹g´%¬Vμq¶�°6±]®;·½¸-²y¹L¨
�© ªi«
ºy»
Another way to solve this problem
¬Vμq°'±p®s·&¸�²�¹L¨
©ª'«m¾ ®¯°'±p®�·$¸q²b¿P±/·¸q² ¯À
À
VÁ
i«
ºÃÂ
�© (^) ªi« Á
Â
¬Vμ[Ä »
±]®�²¹L¨&¬ ®¯°6±k®�·$¸q² ³ ´¬Lμq°6±]®�·Å¸q²¹Y¨�© ªi« Á
Â
Á
Â
#1b1) ÆÇ
±
F¨
i¯�«
º±º ´&¸�²�± º ´¶�²�± º ´ÅÈm²y± º ´%ÉH²�± º ´Ê�²
Æ
;Ë
/© ªi¯�«
The time domain component corresponding to the pole at the origin is given by
Ì
Ç
°6±]®;·¶m² ¾ Ì
Ç
¨BÍkÎÏ
«/Ð
Ë
μ
Æ
Ë
y¹L¨
+Ñ�¶3ÑÒÈ3ÑÓÉÔÑ)Ê
¸q¶mÕ
#1b2)
Æ
q²
Æ
Æ
Ì
Ç
Ì
Ö
Ì
×
º ·)Ö
Ì
Ç
º¯ ´&¸;Ø «zÙ
Ë
Ú¸ ¾ Ì
¢ÖR² ث٪?Û^
±·FÖ?²�±/·L¶[ÖR²
Ø
Ì
Ø
Ü
Ì
'Ü�Ý
Æ
*¸qÞ�¶
º ´Ö
*¸qÞ�¶
º ·¢Ö
#°'±p®�²'´$¶ Ø
Ì
Ø
Ë
£ß�à�á
]®s´ Ü
Ì
²/°6±]®�²
¨&°6±]®�²£´
ß �à�á
]®£´
Ý
²/°6±]®�²;¨~±�¸�´
ß �à�á
®�²²/°6±]®�²;¨�Ä (^) »±p®�² â Ä ¯
±p®�²�¨Ú±�¸�´
ß �à�á
p®s·È�²/²/°6±]®;·È�²
Another way to solve this problem
Æ
�¸q²
äã º
´æå
Åç
º¯ ´&¸
èã
ã
å
Åç º
±º¯ ´�¸q²
â ã
øb¨~· å
(^) ¾ ç�¨�Õ
Æ
±º²g¨
é°'±p®�²·
ß �à�á
p®�²�°'±k®�²êâ Ä ¯
±p®�²�¨�±-¸F·
ß à�á
]®;·È�²°'±p®s·È�²/²
#2a)
Ä
Çmë Ì ?ì (^) ¨�È�í-î ¯±Ì ´%¶�²/°
ë
Ì?ì^ ¨�ï3Ñ)È�í Ì °
ë
Ì�ì^ ´ ¸qð3Ñ)È�ím°
ë
Ì?ì^ ¿éï
È
mñ
±zñV·È�² ¯
�¸qð
ñ
ñ ò·È
qð�ñ (^) ¯ ·¶�ó�ñ
±8ñV·È�² ¯
Another way to find the ô -transform for
Ä
Ç
ë Ì �ì
Ä
Çë Ì�ì (^) ¨�È�í�î ¯±Ì ´%¶�²°
ë
Ì�ì^ ¨�Ä
ë
Ì ´%¶ ì°
ë
Ì�ì^ ¾ Ä
ë Ì�ì (^) °
ë Ì�ì (^) ¨�È�í Ì °
ë
Ì�ì^ ¿
È
�ñ
±/ñV·=È�² ¯
Æ
zñ�²
ô
μ�Ä
Ç
ë
Ì�ì^ ¹�¨�ñ ¯
Æ
±zñ�²·ñ ¯Ä
ë
Õì ·ñ�Ä
ë
¸ì ¨
È
�ñ »
±8ñ+·=È�² ¯
Õe´ÅÈ�ñ+¨
qð�ñ (^) ¯ ·=¶�ó�ñ
±zñV·Èm² ¯
5
The steady state response is
��q �¡ ¢G£�¤z¥
7¦}§~¨K©,ª� )¡ ¢«£�¤z¥
�¬��¦}§~¨��¬K®�¦§~¨U©!m¯ °
±²¦M³�¨´ ¯
m¯ °
The system can reach its steady state value since both poles are in the left half complex plane.
#3b)
± μ¦M¶P¨�
¶ ;�·
¶�¸�z¶,º¹ »
¼%½¿¾cÀ (^) �Á( ¹ ¥
±²¦M¶�¨U©dÃ
·
¶
±μ¦S¶�¨�
°
¶ ÅÄ
°
(^) ¶;ƹ ¸
Ä
·
Ƕ;h¹ ¸�È
¸
¼½ ¾dÀ (^) ÁÉ ¹�Ê ° Ä
° ¶
¶ Nº¹ ¸
Ä
¶
Ƕ;º¹ ¸PÈ
¸ WË
�Ì ½¿¾PÀ^ ÎÍ Ä
°Ï^ Ä
·
Ð Ñ,Ò
Ð ¾ Ï (^) Ä
·
ÐÑNÓÕÔ
½ ¾ PÀ
ÁÅÖ��¬K® ½¿¾PÀ^ y�¬K® ½¾ Ä
·À
·
°
�¬K® ½¾ Ä
ÐÀ �³a×
ØÚÙ (^) ¬K® ¦S¶�¨
·
¶
Ù ¬K® ¦S¶�¨y ½ Ä
·À
·
°
Ï
·
¶ �¸
Ù ¬ ~® ¦M¶P¨%
·
¶
¬K® ½ Ä
·Ày ¬K® ½ Ä
ÐÀ Ñ
�³
Ù ¬K® ¦S¶�¨ Ï ·�
·
¶
·
° ¶ Ñ
Ä
¬K® ½ Ä
·À Ä
·
¶
¬K® ½ Ä
·À Ä
¬K® ½ Ä
ÐÀ Ä ÜÛÐ Ä
·
°¶
Ù ¬~® ¦M¶P¨� Ä
·
Ð
¦
Û
¶;·�¨
¶ (^) Ç ¶ ¸ z¶, ¹ » È
·
¶
Ù¬K®�¦S¶�¨� Ä
³0Ý ¯ Û
¶ ;�·
Ç ¶¸ ¶; (^) »¹ È
¾ ¹ ¶, ¹ ¸
¾ ¸ Ƕ; ¹ ¸ È
¸
Ä ÛPÞ^
Ð
¶; ¹ ¸
·
Þ
°
Ƕ; ¹ ¸ È
¸
�¬~® ½¿¾PÀ^ �Á  ¹Ê Ä Û Ð
¶ (^) Ç ¶ ; ¹ ¸ È
·
°
¶
Ƕ; ¹ ¸ È
¸
´
Ç
Ä
¹ ¸ È Ç
Ä
¹ ¸ È
Ë
Ä Û
Ð
Ï
Ä
·
Ð Ñ Ò�Ô
½ ¾ PÀ Ä
·
Ð
¾ Ï Ä
·
Ð Ñ Ò�Ô
½ ¿¾PÀ
ØÚÙ (^) ¬UߦM¶�¨�±μ¦M¶P¨Kà ¦G¶�¨�
¶ ;�· Ç ¶¸ z¶,º¹» È
¶ Ç ¶;h¹» È
·
¶
Ù ¬� ¦M¶P¨�
¾ ¹ ¶ ;º¹»
¾ ¸ ¹ ¶;á¹ ¸
¾ ¸ K¸ Ç ¶; ¹ ¸ cÈ
¸
· Ð
¶ ;h¹» Ä
· Ð
¶;h¹ ¸
Ä
Ð
Ƕ, ¹ ¸ PÈ
¸
¬� ½¾PÀ^ �Á  ¹Ê
· Ð
¶ ;ƹ» Ä
· Ð ¶
¶;h¹ ¸
Ä
Ð ¶
Ƕ; ¹ ¸ cÈ
¸
´
Ç
Ä
¹ ¸ �È Ç
Ä
¹ ¸È
Ë
(^) 8· Ð Ï Ä
·
° Ñ Ò�Ô
½ ¿¾PÀ Ä
(^) ·Ð Ï Ä
·
Ð Ñ Ò�Ô
½ ¾ dÀ ° ¾ Ï Ä
·
Ð Ñ Ò�Ô
½ ¿¾PÀ
7