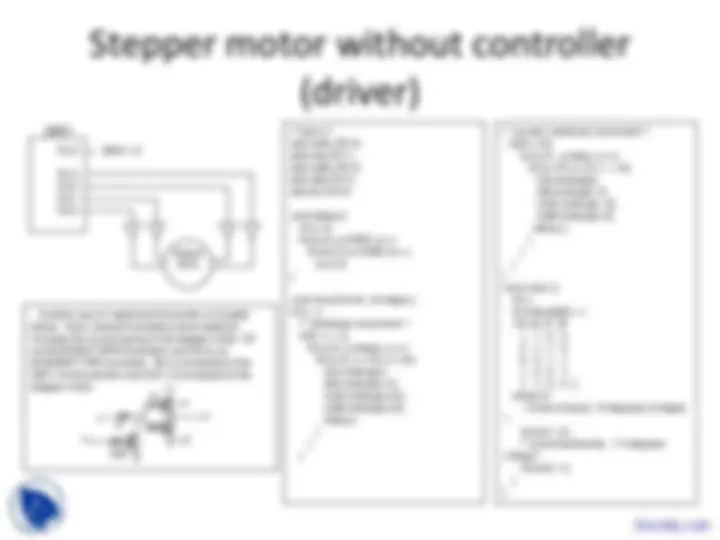
Stepper motor controller
•Stepper motor: rotates fixed number
of degrees when given a “step”
signal
–In contrast, DC motor just rotates when
power applied, coasts to stop
•Rotation achieved by applying
specific voltage sequence to coils
•Controller greatly simplifies this
•Assume a STEP is a sequence of 5
commands, where each command
moves 1.5 degree.
1
Red A
White A’
Yellow B
Black B’
MC3479P
1
5
4
3
2
7
8
6
16
15
14
13
12
11
10
9
Vd
A’
A
GND
Bias’/Set
Clk
O|C
Vm
B
B’
GND
Phase A’
CW’/CCW
Full’/Half Step
Sequence
A B
A’
B’
1 + + - -
2 - + + -
3 - - + +
4 + - - +
5 + + - -
Docsity.com