


Linear Algebra
Linear Transformations
Docsity.com
























































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Community
Ask the community for help and clear up your study doubts
Discover the best universities in your country according to Docsity users
Free resources
Download our free guides on studying techniques, anxiety management strategies, and thesis advice from Docsity tutors
Dr. Arjun Kapoor delivered this lecture at Institute of Mathematics and Applications for Linear Algebra course to cover following points: Linear, Transformations, Real, Valued, Functions, Transformation, Matrix, Augmented, Image, Shear
Typology: Slides
1 / 75

This page cannot be seen from the preview
Don't miss anything!
2
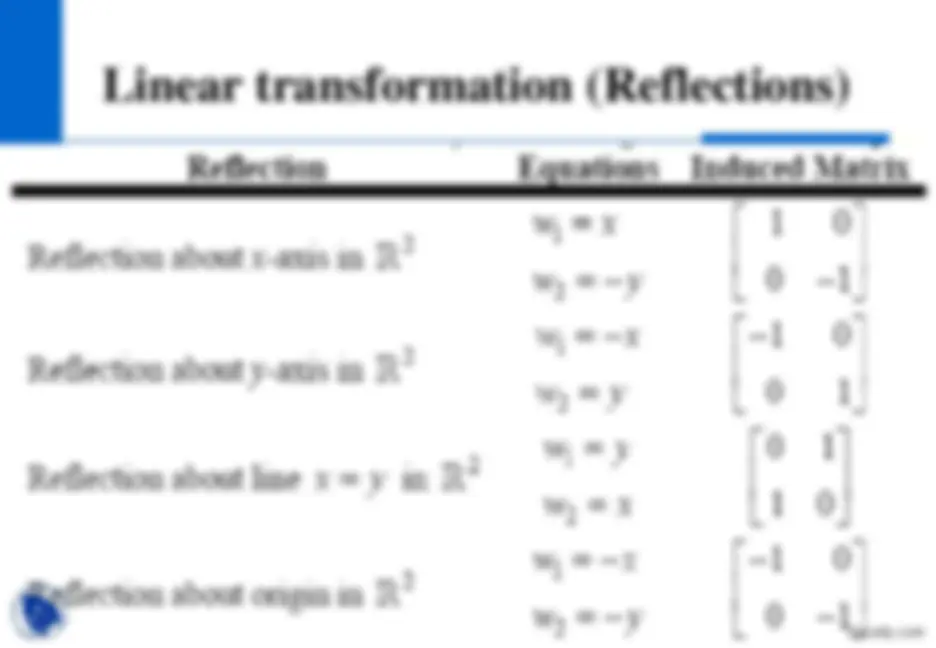
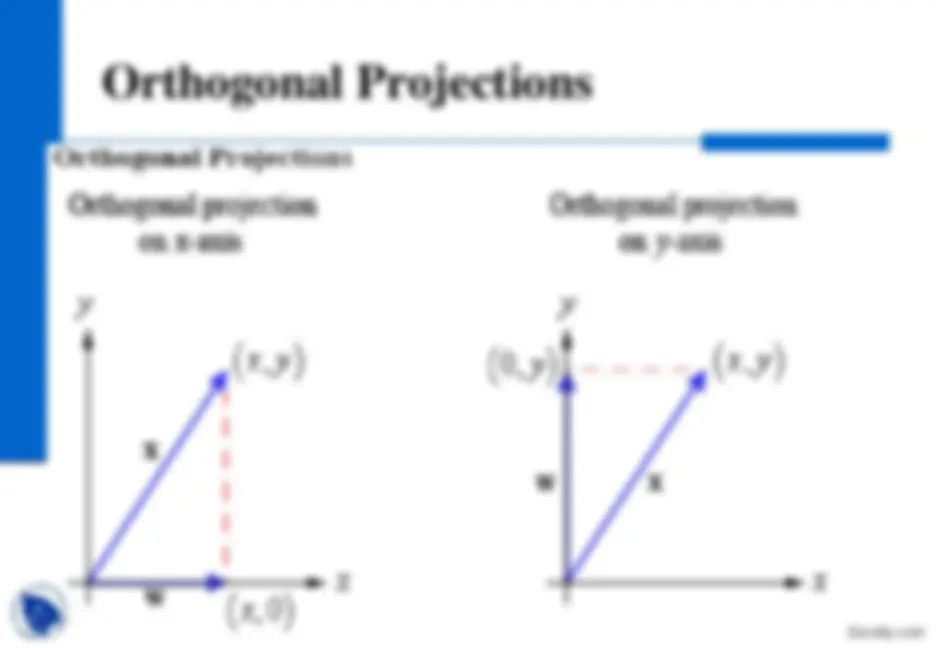
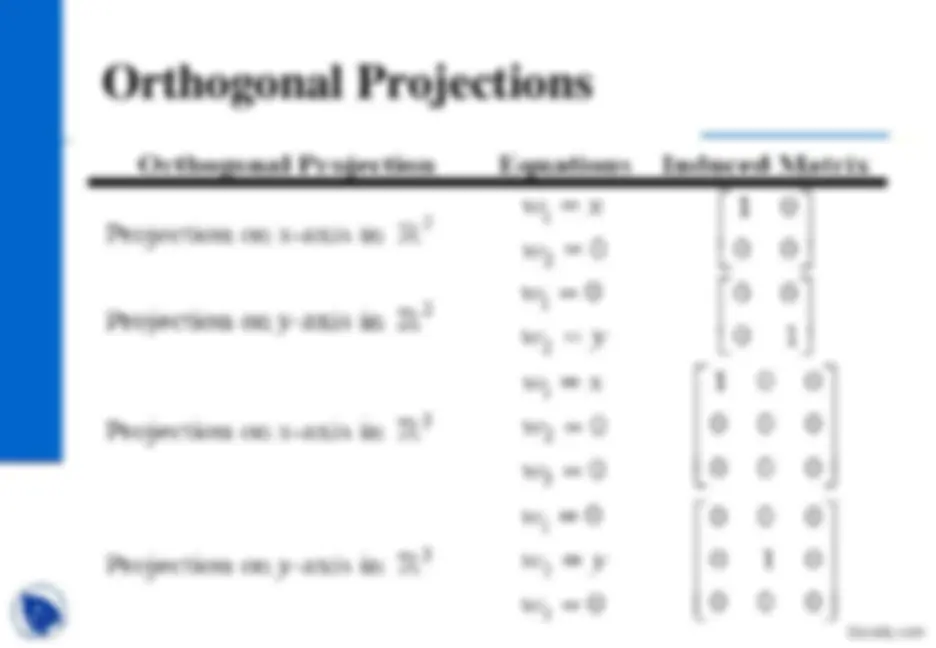
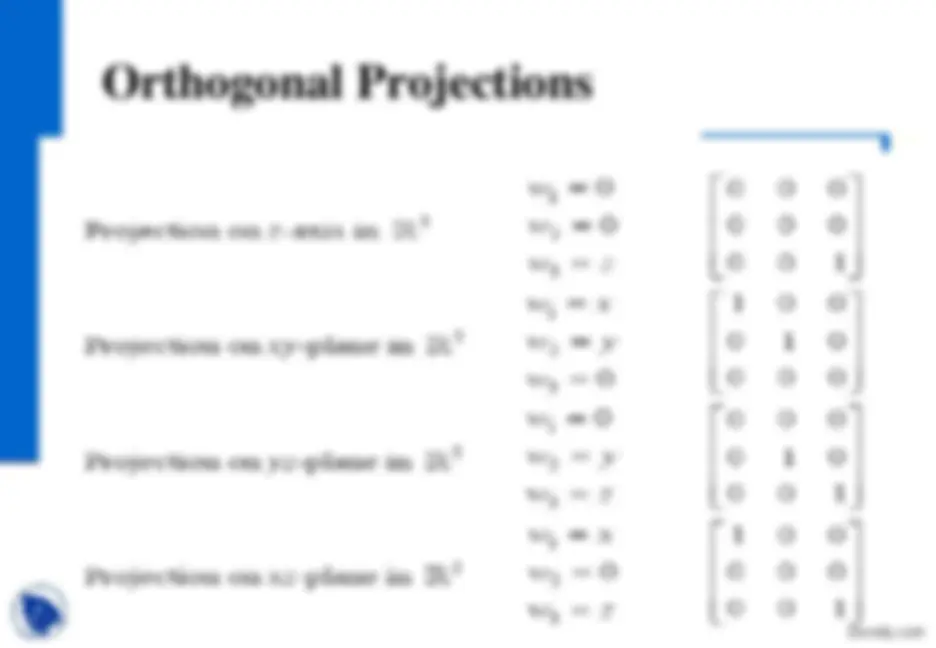
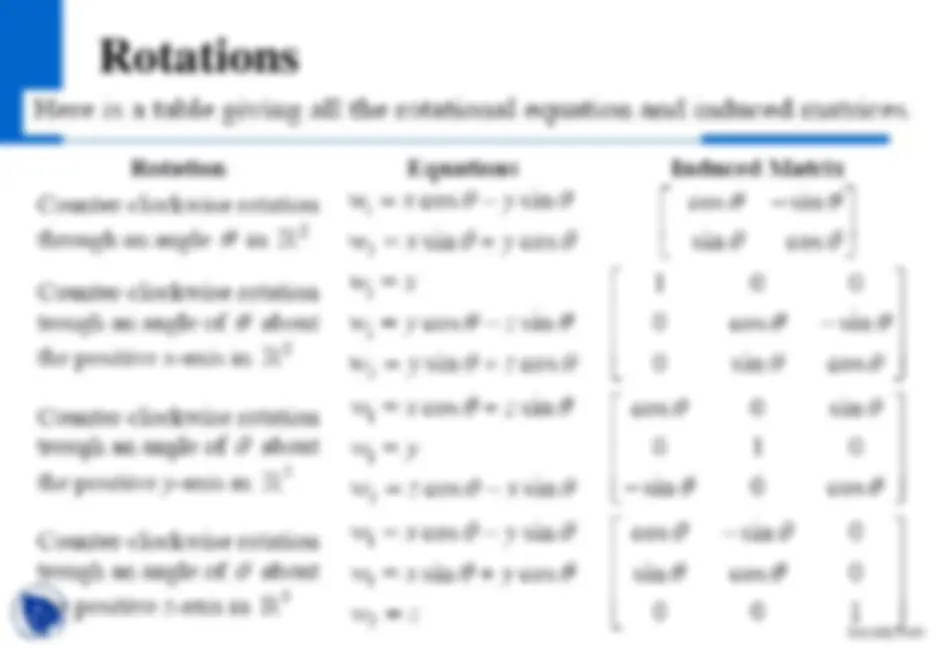
Formula Example Description
Function from R to R Function from to R Function from to R
Function from to R
2 2 2
2
2 2
2 1 , 2 , , 1
n
n
x
f x x x x x
2 R 3 R n R
4
Another way to view :
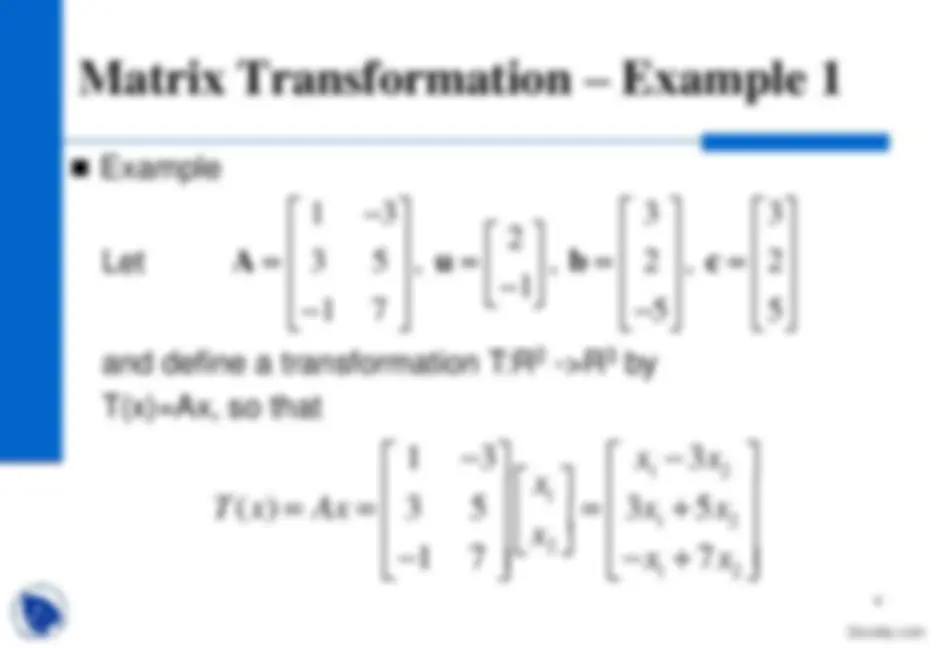
Matrix A is an object acting on x by multiplication to produce a new vector Ax or b.
Example
Ax = b
1
4 3 1 3 1 5
2 0 5 1 1 8
1
(^)
Ax = b
5
Solving Ax = b amounts to finding all vectors x in Rn
that are transformed into the vector b in Rm^ under the action of multiplication by Am×n. The correspondence from x to b is a function from one set of vectors to another. This concept is generalization of f:R - > R.
x (^) b
Multiplication by A
n m
7
8
For each x in Rn^ , Tx is computed as Ax , where A is
an m×n matrix. We sometimes denote this Matrix Transformation by x - > Ax. Domain of T lies in Rn when A has n columns and range of T lies in Rm^ when each column of A has m entries.
10
a. Find T(u) , the image of u under the transformation T b. Find an x in R^2 whose image under T is b. c. Is there more than one x whose image under T is b. d. Determine if c is in the range of the transformation T.
11
Solution a.
b. Solve Tx=b for x. That is, solve Ax=b
1 3 5 2 3 5 1 1 1 7 9
^ (^) (^) (^) (^)
T(u) = Au
1
2
1 3 3
3 5 2
1 7 5
x
x
^ (^) (^)
13
c. Any x whose image under T is b must satisfy
We have seen in (b) that there is exactly one x whose
image is b.
1
2
1 3 3
3 5 2
1 7 5
x
x
^ (^) (^)
14
d. The vector c is in the range of T if c is the image of some
x in R^2 , that is, if c=T(x) for some x. This is just another way of asking if the system Ax=c is consistent. To find the answer, row reduce the augmented matrix
The third equation 0 =- 35 shows that the system is
inconsistent. So c is not in the range of T.
1 3 3 1 3 3 1 3 3 1 3 3 3 5 2 0 14 7 0 1 2 0 1 2 1 7 5 0 4 8 0 14 7 0 0 35
^ ^ ^ (^) (^) (^) (^)
16
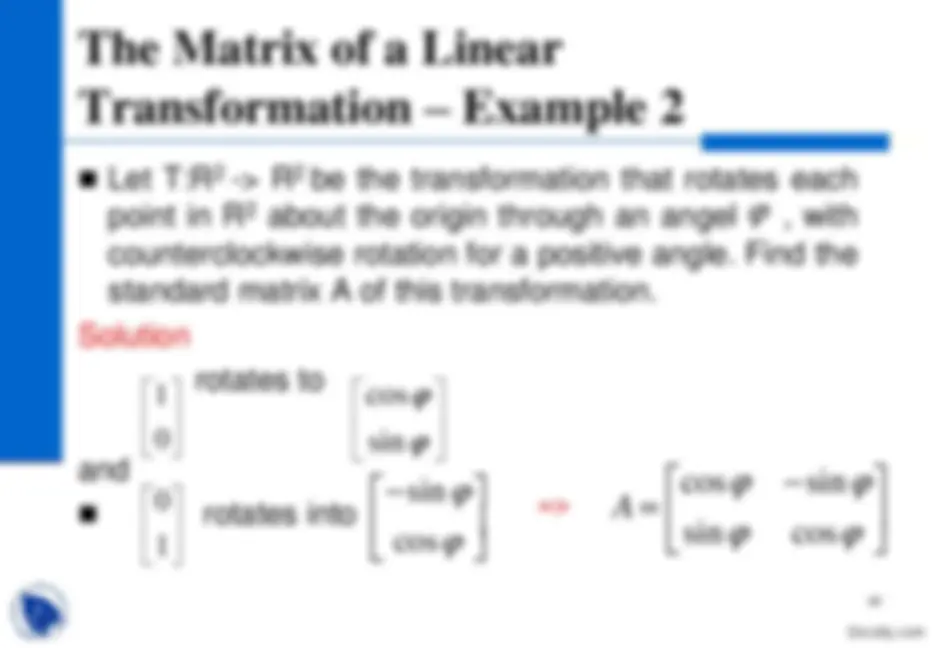
Let
Then the transformation T:R^2 - > R^2 defined by Ax is
called the Shear Transformation.
For example the image of
1 3 0 1
A
2 1 3 2 8 is 2 0 1 2 2
17
Shear Transformation
19
1 1 1 2 2 2 3 3 3
1 1 1 1 2 2 2 2 3 3 3 3
1 1 2 2 3 3 1 1 2 2 3 3
1 1
1 2 3 2 1 2 3 2
3 3
a ( u v ) a ( u v ) a ( u v )
a u a v a u a v a u a v
a u a u a u a v a v a v
u v
a a a u a a a v
u v
Au Av
Similarly (b) can also be proved
20
A transformation T is linear, if
1. T(u+v) = T(u) + T(v) **(for all u,v in the domain of T)
Property ( 1 ) says that the result T(u+v) i.e. first adding
u+v and then applying T is same as applying T first to u and v and then adding T(u) and T(v).