Download Perspective Camera Model: Intrinsic and Extrinsic Parameters and more Slides Computer Vision in PDF only on Docsity!
CCD Camera
- We have assumed same units for world & image coordinates
- In a CCD camera, image coordinates are measured in pixels
- Some CCD cameras also have non-square pixels
- We can convert to pixel units as
where m
x
and m
y
are scale factors of pixels per unit length,
needed to convert to pixel dimension
- mx = #of pixels in x direction / size of CCD array in x direction
- my = #of pixels in y direction / size of CCD array in y direction
- ( x
, y
) is principal point offset in pixel dimensions
K =
mxf 0 x 0
0 my f y 0
x 0 = mxpx, y 0 = my py
Pinhole camera in general view
- This is for the case when the camera’s optical axis is
aligned with the world z-axis
- What if that is not the case?
Example
- Translation by 10 units to the right 10 X Z [10, 0, 10]T
Pinhole camera in general view
- In general, the camera center is at a rotation of R
T
, followed
by a translation of C from the world origin
- Then World Axes Camera Axes C R
T
hx
hy
h
mxf 0 x 0 0
0 my f y 0 0
B
B
r 11 r 12 r 13 0
r 21 r 22 r 23 0
r 31 r 32 r 33 0
1 0 0 �Cx
0 1 0 �Cy
0 0 1 �Cz
X
Y
Z
C
C
A
Camera Model Example
- Think that the camera was
originally at the origin
looking down Z axis
- Then it was translated by
( r
, r
, r
T
, rotated by φ along X , θ along Z, then
translated by
( x
, y
, z
T
- This is the scenario in the
figure on right
Figure Reference: Gonzales and Woods, “Digital Image Processing”
Camera Model Example ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ 0 0 0 1 0 0 1 0 1 0 1 0 0 3 2 1 r r r ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − 0 0 0 1 0 sin cos 0 0 cos sin 0 1 0 0 0
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − 0 0 0 1 0 0 1 0 sin cos 0 0 cos sin 0 0
1 0 0 X 0 θ θ
0 1 0 Y 0 0 0 1 Z 0 0 0 0 1 ! "
$ % & & & & & mx f 0 x 0 0 0 my f y 0 0 0 0 1 0 ! "
$ % & & & &
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − 0 0 0 1 0 0 1 0 1 0 1 0 0 3 2 1 r r r ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − 0 0 0 1 0 sin cos 0 0 cos sin 0 1 0 0 0
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − 0 0 0 1 0 0 1 0 sin cos 0 0 cos sin 0 0
⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − 0 0 0 1 0 0 1 0 1 0 1 0 0 0 0 0 Z Y X mx f 0 x 0 0 0 my f y 0 0 0 0 1 0 ! "
$ % & & & &
Aircraft Example
P =
mx f 0 x 0 0 0 my f y 0 0 0 0 1 0
cos ω 0 −sin ω 0 0 1 0 0 sin ω 0 cos ω 0 0 0 0 1
cos τ sin τ 0 0 −sin τ cos τ 0 0 0 0 1 0 0 0 0 1
cos ϕ 0 −sin ϕ 0 0 1 0 0 sin ϕ 0 cos ϕ 0 0 0 0 1
0 cos β sin β 0 0 −sin β cos β 0 0 0 0 1
cos α sin α 0 0 −sin α cos α 0 0 0 0 1 0 0 0 0 1
1 0 0 −Δ Tx 0 1 0 −Δ Ty 0 0 1 −Δ Tz 0 0 0 1
cameraMat = perspective_transform * gimbal_rotation_y * gimbal_rotation_z * gimbal_translation * vehicle_rotation_x * vehicle_rotation_y * vehicle_rotation_z * vehicle_translation ;
OTTER system_id
TV sensor_type
0001 serial_number
9.400008152666640300e+08 image_time
3.813193746469612200e+01 vehicle_latitude
-7.734523185193877700e+01 vehicle_longitude
9.949658409987658800e+02 vehicle_height
9.995171174441039900e-01 vehicle_pitch
1.701626418113209000e+00 vehicle_roll
1.207010551753029400e+02 vehicle_heading
1.658968732990974800e-02 camera_focal_length
-5.361314389557259100e+01 camera_elevation
-7.232969433546705000e+00 camera_scan_angle
480 number_image_lines
640 number_image_samples
c(1,1) = (cos(c_scn)cos(v_rll)-sin(c_scn)sin(v_pch)sin(v_rll))cos(v_hdg)-sin(c_scn)cos(v_pch)sin(v_hdg); c(1,2) = -(cos(c_scn)cos(v_rll)-sin(c_scn)sin(v_pch)sin(v_rll))sin(v_hdg)-sin(c_scn)cos(v_pch)cos(v_hdg); c(1,3) = -cos(c_scn)sin(v_rll)-sin(c_scn)sin(v_pch)cos(v_rll); c(1,4) = -((cos(c_scn)cos(v_rll)-sin(c_scn)sin(v_pch)sin(v_rll))cos(v_hdg)-sin(c_scn)cos(v_pch)sin(v_hdg))vx-(-(cos(c_scn)cos(v_rll)- sin(c_scn)sin(v_pch)sin(v_rll))sin(v_hdg)-sin(c_scn)cos(v_pch)cos(v_hdg))vy-(-cos(c_scn)sin(v_rll)-sin(c_scn)sin(v_pch)cos(v_rll))vz; c(2,1) = (-sin(c_elv)sin(c_scn)cos(v_rll)+(-sin(c_elv)cos(c_scn)sin(v_pch)+cos(c_elv)cos(v_pch))sin(v_rll))cos(v_hdg)+(-sin(c_elv)cos(c_scn)cos(v_pch)- cos(c_elv)sin(v_pch))sin(v_hdg); c(2,2) = -(-sin(c_elv)sin(c_scn)cos(v_rll)+(-sin(c_elv)cos(c_scn)sin(v_pch)+cos(c_elv)cos(v_pch))sin(v_rll))sin(v_hdg)+(-sin(c_elv)cos(c_scn)cos(v_pch)- cos(c_elv)sin(v_pch))cos(v_hdg); c(2,3) = sin(c_elv)sin(c_scn)sin(v_rll)+(-sin(c_elv)cos(c_scn)sin(v_pch)+cos(c_elv)cos(v_pch))cos(v_rll); c(2,4) = -((-sin(c_elv)sin(c_scn)cos(v_rll)+(-sin(c_elv)cos(c_scn)sin(v_pch)+cos(c_elv)cos(v_pch))sin(v_rll))cos(v_hdg)+(- sin(c_elv)cos(c_scn)cos(v_pch)-cos(c_elv)sin(v_pch))sin(v_hdg))vx-(-(-sin(c_elv)sin(c_scn)cos(v_rll)+(-sin(c_elv)cos(c_scn)sin(v_pch) +cos(c_elv)cos(v_pch))sin(v_rll))sin(v_hdg)+(-sin(c_elv)cos(c_scn)cos(v_pch)-cos(c_elv)sin(v_pch))cos(v_hdg))vy- (sin(c_elv)sin(c_scn)sin(v_rll)+(-sin(c_elv)cos(c_scn)sin(v_pch)+cos(c_elv)cos(v_pch))cos(v_rll))vz; c(3,1) = (cos(c_elv)sin(c_scn)cos(v_rll)+(cos(c_elv)cos(c_scn)sin(v_pch)+sin(c_elv)cos(v_pch))sin(v_rll))cos(v_hdg)+(cos(c_elv)cos(c_scn)cos(v_pch)- sin(c_elv)sin(v_pch))sin(v_hdg); c(3,2) = -(cos(c_elv)sin(c_scn)cos(v_rll)+(cos(c_elv)cos(c_scn)sin(v_pch)+sin(c_elv)cos(v_pch))sin(v_rll))sin(v_hdg)+(cos(c_elv)cos(c_scn)cos(v_pch)- sin(c_elv)sin(v_pch))cos(v_hdg); c(3,3) = -cos(c_elv)sin(c_scn)sin(v_rll)+(cos(c_elv)cos(c_scn)sin(v_pch)+sin(c_elv)cos(v_pch))cos(v_rll); c(3,4) = -((cos(c_elv)sin(c_scn)cos(v_rll)+(cos(c_elv)cos(c_scn)sin(v_pch)+sin(c_elv)cos(v_pch))sin(v_rll))cos(v_hdg)+(cos(c_elv)cos(c_scn)cos(v_pch)- sin(c_elv)sin(v_pch))sin(v_hdg))vx-(-(cos(c_elv)sin(c_scn)cos(v_rll)+(cos(c_elv)cos(c_scn)sin(v_pch)+sin(c_elv)cos(v_pch))sin(v_rll))sin(v_hdg) +(cos(c_elv)cos(c_scn)cos(v_pch)-sin(c_elv)sin(v_pch))cos(v_hdg))vy-(-cos(c_elv)sin(c_scn)sin(v_rll)+(cos(c_elv)cos(c_scn)sin(v_pch) +sin(c_elv)cos(v_pch))cos(v_rll))vz; c(4,1) = (1/flcos(c_elv)sin(c_scn)cos(v_rll)+(1/flcos(c_elv)cos(c_scn)sin(v_pch)+1/flsin(c_elv)cos(v_pch))sin(v_rll))cos(v_hdg)+(1/ flcos(c_elv)cos(c_scn)cos(v_pch)-1/flsin(c_elv)sin(v_pch))sin(v_hdg); c(4,2) = -(1/flcos(c_elv)sin(c_scn)cos(v_rll)+(1/flcos(c_elv)cos(c_scn)sin(v_pch)+1/flsin(c_elv)cos(v_pch))sin(v_rll))sin(v_hdg)+(1/ flcos(c_elv)cos(c_scn)cos(v_pch)-1/flsin(c_elv)sin(v_pch))cos(v_hdg); c(4,3) = -1/flcos(c_elv)sin(c_scn)sin(v_rll)+(1/flcos(c_elv)cos(c_scn)sin(v_pch)+1/flsin(c_elv)cos(v_pch))cos(v_rll); c(4,4) = -((1/flcos(c_elv)sin(c_scn)cos(v_rll)+(1/flcos(c_elv)cos(c_scn)sin(v_pch)+1/flsin(c_elv)cos(v_pch))sin(v_rll))cos(v_hdg)+(1/ flcos(c_elv)cos(c_scn)cos(v_pch)-1/flsin(c_elv)sin(v_pch))sin(v_hdg))vx-(-(1/flcos(c_elv)sin(c_scn)cos(v_rll)+(1/ flcos(c_elv)cos(c_scn)sin(v_pch)+1/flsin(c_elv)cos(v_pch))sin(v_rll))sin(v_hdg)+(1/flcos(c_elv)cos(c_scn)cos(v_pch)-1/ flsin(c_elv)sin(v_pch))cos(v_hdg))vy-(-1/flcos(c_elv)sin(c_scn)sin(v_rll)+(1/flcos(c_elv)cos(c_scn)sin(v_pch)+1/ flsin(c_elv)cos(v_pch))cos(v_rll))vz+1;
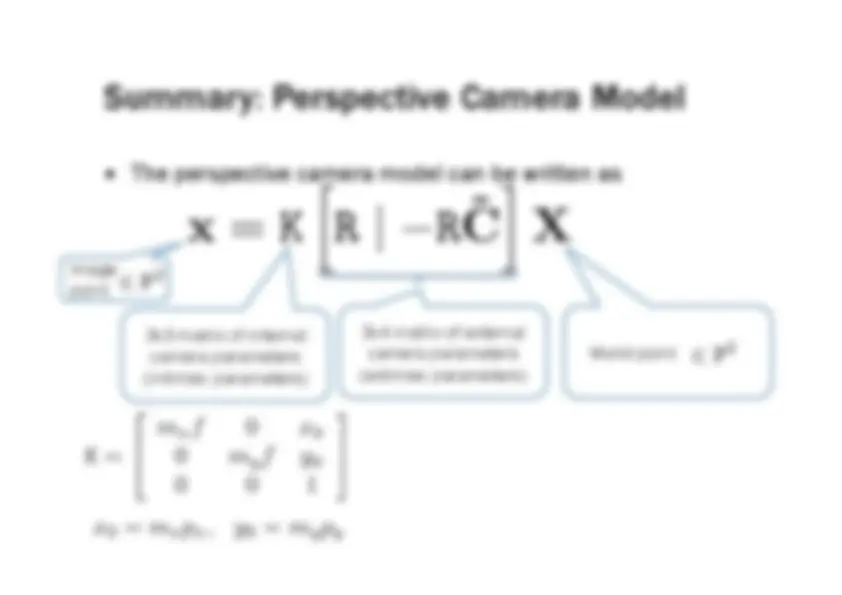
Summary: Perspective Camera Model
• The perspective camera model can be written as
K =
mxf 0 x 0
0 my f y 0
x 0 = mxpx, y 0 = my py
3x3 matrix of internal camera parameters (intrinsic parameters) 3x4 matrix of external camera parameters (extrinsic parameters)
World point 2 P
3 Image point
2 P
2
x = K
h
R | �R
C
i
X